Principe fondamental de la statique

Mécanique Statique Statique S2
Principe Fondamental de la Statique page 1/4
Objectifs :
- Enoncer le principe fondamental de la statique ;
- Indiquer plusieurs méthodes de résolution de problèmes répondants aux hypothèses de la statique ;
- Appliquer le P.F.S. à des cas particuliers simples.
Statique
Principe fondamental de la statique
Note : Le Principe Fondamental de la Statique sera souvent noté « P.F.S. » par la suite.
1. Enoncé du principe
1.1. Hypothèses
On supposera que les solides sont :
géométriquement parfaits ;
indéformables.
La matière est supposée :
homogène : tous les atomes sont identiques, le centre de gravité réel coïncide avec le centre de
gravité géométrique ;
isotrope : la matière a les mêmes caractéristiques mécaniques dans toutes les directions.
1.2. Enoncé général
Un solide indéformable en équilibre sous l’action de n forces extérieures (£F1, £F2, … , £Fn) reste en équilibre si :
La somme vectorielle (résultante £R) de toutes les forces extérieures est nulle :
£R =
n
i
i
1F
=£F1 + £F2 + … + £Fn = £0 (1)
La somme vectorielle des moments (moment résultant _MI ) de toutes les forces extérieures en n’importe quel
point I de l’espace est nul :
ÄI =
n
i1
ÄI(£Fi) = ÄI(£F1) + ÄI(£F2) + … + ÄI(£Fn) = £0 (2)
L’équation (1) est appelée Théorème de la Résultante Statique ( T.R.S. )
L’équation (2) est appelée Théorème du Moment résultant Statique ( T.M.S. )
Remarque : Ce principe est également vérifié pour des solides dont le mouvement est effectué sans
accélération, cas des solides en mouvement de translation rectiligne uniforme.
1.3. Statique par les torseurs
Le principe énoncé précédemment (sous forme vectorielle) peut être écrit en utilisant les torseurs .
Un solide (S), en équilibre sous l’action de n torseurs d’actions mécaniques {T1/S}A, {T2/S}B, … , {Tn/S}N reste en
équilibre si la somme des n torseurs, tous écrits au même point I, est égale au torseur nul {0} :
{ ©1/S }I + { ©2/S }I + … + { ©n/S }I = { 0 }

Mécanique Statique Statique S2
Principe Fondamental de la Statique page 2/4
1.4. Equations de projection
Les équations vectorielles (1) et (2) donnent chacune trois équations scalaires de projection sur les
axes x, y et z. Dans le cas le plus général, on disposera donc de six équations scalaires qui
permettront de déterminer, au plus, six inconnues.
Exemple :
X1
X2
Xn
£F1
Y1
£F2
Y2
(…)
£Fn
Yn
Z1
Z2
Zn
T.R.S.
Sur x : X1 + X2 + … + Xn = 0
Sur y : Y1 + Y2 + … + Yn = 0
Sur z : Z1 + Z2 + … + Zn = 0
Soit : 3 équations.
L1
L2
Ln
ÄA(£F1)
M1
ÄA(£F2)
M2
…
ÄA(£Fn)
Mn
N1
A,R
N2
A,R
Nn
A,R
T.M.S.
Sur x : L1 + L2 + … + Ln = 0
Sur y : M1 + M2 + … + Mn = 0
Sur z : N1 + N2 + … + Nn = 0
Soit : 3 équations.
2. Méthodes de résolution
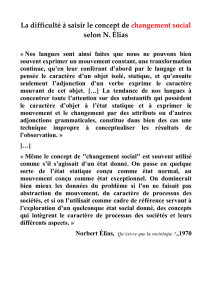
2.1. Méthode générale de résolution
Isoler le solide (ou l’ensemble
de solides) considéré.
Faire le bilan des actions mécaniques
extérieures agissant sur le solide isolé. Tenir
compte éventuellement des actions à distance.
Comptabiliser le nombre N de coordonnées
ou de composantes torseur inconnues.
N 6
Exprimer tous les torseurs au même point
(choisir un point simplifiant les calculs).
oui
non
Appliquer le P.F.S.
En déduire les K équations
scalaires de projection.
Résoudre.
N K
Conclure.
non
oui
Déterminer d’autres
composantes en isolant
d’autres solides et en
appliquant le principe
des actions mutuelles
Résolution impossible.
Système hyperstatique.
possible
impossible
x
y
z

Mécanique Statique Statique S2
Principe Fondamental de la Statique page 3/4
2.2. Tableau récapitulatif des actions mécaniques
Pour simplifier l’analyse et comptabiliser les éléments connus ou inconnus, il peut être intéressant d’utiliser un
tableau récapitulatif.
Exemple :
2.3. Résolution analytique
Lorsque l’étude fournit au moins autant d’équations que d’inconnues, la résolution mathématique de ce
système d’équations est appelée résolution analytique. Elle permet de déterminer jusqu’à 6 inconnues.
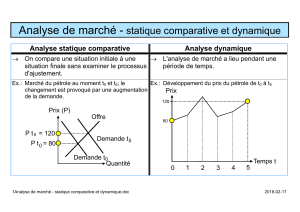
2.4. Résolution graphique
Dans le cas particulier où les forces sont coplanaires (= appartiennent toutes à un même plan), on peut
envisager une résolution graphique du problème.
On trace alors un dynamique, qui représente à une échelle donnée les différentes forces. En statique, les forces
mises bout à bout forment un polygone fermé. On dit que « le dynamique est fermé ».
Exemple :
Force Point
d’application Direction Sens Intensité
£F 1I à 45° 100 N
£F 2J120 N
£F 3K ? ? ?
Echelle : 1 mm 2 N
Point de départ
£F 1
£F 2
£F 3
Tableau récapitulatif :
Force
Point
d’application
Direction
Sens
Intensité
£Asol/1
A
Verticale
?
£Bsol/1
B
Verticale
?
£P
G
Verticale
12 000 N

Mécanique Statique Statique S2
Principe Fondamental de la Statique page 4/4
3. Cas particuliers de la statique
3.1. Solide soumis à l’action deux forces
Un solide soumis à l’action de deux forces reste en équilibre si les deux
forces sont égales en norme et opposées en sens.
Par conséquent, les deux forces ont :
Même ligne d’action
Même intensité
Sens opposé
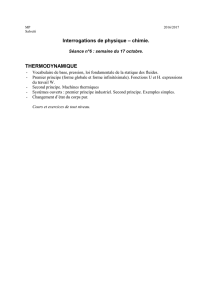
3.2. Solide soumis à l’action de trois forces concourantes
Un solide soumis à l’action de trois forces (non parallèles) reste en
équilibre si les trois forces sont concourantes au même point et si la
somme vectorielle des trois forces est nulle.
I
£F 1
£F 2
£F 3
£F 1
£F 2
£F 3
£F 1 + £F2 + £F3 = £0
1
/
4
100%