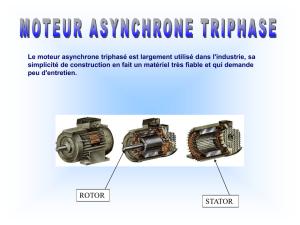
MOTEUR ASYNCHRONE TRIPHASÉ

T ba date :
Ph. Georges Sciences 1/5
S N
1
2
3
N
Les sens des bobinages sont repérés :
les bornes homologues ont des points
I- Champ tournant dans l'air
1- Utilisation d'un aimant
Lorsque l'aimant en fer à cheval tourne autour de son axe vertical, il crée un champ tournant.
L'aiguille aimantée et le cylindre de
cuivre sont entraînés en rotation.
L'aiguille aimantée tourne à la même
vitesse que l'aimant (elle reste dans
l'axe de l'aimant).
Le cylindre de cuivre tourne plus
lentement que l'aimant.
2- Champ tournant produit par un système triphasé de courants
1ère expérience
Trois bobines à noyau de fer, identiques, décalés de 120°, sont
alimentées par un système triphasé de courants (f = 50 Hz) dont
les intensités sont les suivantes : i1 = I 2 cos
t
i2 = I 2 cos(
t –
Error!
) i3 = I
Error!
cos(
t –
Error!
)
L'aiguille aimantée tourne spontanément. Sa fréquence de
rotation, mesurée à l'aide d'un stroboscope, est de 50 tr/s.
L'ensemble des trois bobines crée un champ tournant dans l'air. Celui-ci est mis en évidence par la
rotation de l'aiguille à une fréquence égale à celle des courants qui parcourent les bobines.
La fréquence de rotation du champ tournant est appelée fréquence de synchronisme ns.
2ème expérience
Permutons les liaisons de deux bobines au réseau.
L'aiguille aimantée tourne encore spontanément mais dans le sens inverse. Sa fréquence de rotation
reste inchangée.
La permutation de deux phases provoque l'inversion du sens de rotation du champ tournant.
3ème expérience
Un cylindre de cuivre est placé au centre du système des trois bobines.
Le cylindre tourne spontanément à une fréquence très inférieure à celle de l'aiguille aimantée.
La fréquence de rotation du cylindre est très inférieure à la fréquence de synchronisme: la rotation du
cylindre est asynchrone.
La permutation de deux phases provoque le changement du sens de rotation du cylindre.
NS
Aiguille aimantée entraînée
par la rotation de l'aimant Cylindre de cuivre entraîné
par la rotation de l'aimant

Ph. Georges Sciences 2/5
II- Principe de fonctionnement
Le moteur asynchrone triphasé est aussi nommé moteur à induction.
Le stator est alimenté par le réseau d'énergie.
Le rotor en court-circuit est libre de tourner à l'intérieur du stator.
Les courants triphasés alimentant le stator donnent naissance à un champ tournant qui induit des
courants dans les conducteurs du rotor.
L'action du champ tournant sur les courants rotoriques génère des forces électromagnétiques qui font
tourner le rotor.
Le bobinage du stator produit un champ tournant.
Chaque bobine du stator, parcourue par un courant sinusoïdal, produit sur son axe un champ sinusoïdal.
Les trois bobines forment un système triphasé équilibré de courants d'où la formation d'un système triphasé équilibré de
champ : le champ tournant.
La fréquence de rotation du champ tournant est la fréquence de synchronisme ns.
Le circuit du rotor est parcouru par des courants induits.
Le champ sinusoïdal produit dans les conducteurs du rotor une variation de flux.
Toute variation de flux dans un circuit fermé donne naissance à un courant induit (Loi de Faraday).
Tout conducteur parcouru par un courant, placé dans un champ d'induction magnétique, est soumis à une force
électromagnétique, la force de Laplace (Loi de Laplace).
Le rotor tourne à une fréquence de rotation n inférieure à la fréquence de synchronisme ns.
Le sens du courant induit est tel que les effets qu'il produit s'opposent à la cause qui lui a donnée naissance (Loi de Lenz).
Les effets sont les forces de Laplace. Elles doivent s'opposer à la cause du courant induit, la rotation du champ tournant. Les
forces de Laplace entraînent le rotor en rotation et tendent à déplacer les conducteurs à la vitesse de synchronisme.
Si le rotor tournait à la fréquence de synchronisme il n'y aurait pas de courants induits, donc pas de force de Laplace et par
conséquent pas de rotation du rotor. La fréquence de rotation du rotor demeure inférieure à la fréquence de synchronisme du
champ tournant.
Point de vue : un observateur entraîné par le champ tournant voit le rotor tourner à l'envers à une vitesse très faible. Le rotor
glisse par rapport au champ tournant. Les mouvements sont relatifs (dépassement d'une auto).
Le champ rotorique tourne par rapport au rotor à la vitesse angulaire de glissement ou vitesse relative rs -
nr = ns - n). Le champ rotorique tourne par rapport au stator à s = r.
Les deux champs sont synchrones et ils forment un champ unique à répartition sinusoïdale.
III- Fréquence de rotation
La fréquence du champ tournant ou fréquence de synchronisme est donnée par la relation :
ns = Error!
avec
ns : vitesse en tr/s.
f : fréquence en Hz.
p : nombre de paires de pôles par phase.
La vitesse angulaire de synchronisme est :
sns en rad.s – 1
Limites des fréquences de rotation
Pour une fréquence donnée, la fréquence de rotation ne dépend que du
facteur de construction : le nombre de paires de pôles.
La limite haute des fréquences de rotation est définie par le nombre
minimal de pôles, soit 1. Elle est de 3000 tr/min pour 50 Hz.
La limite inférieure est fonction des contraintes technologiques liées au
positionnement du nombre de paires de pôles ; en général la fréquence
minimale est de 500 tr/min, soit 6 paires de pôles.
f = 50 Hz
p
ns (tr/min)
1
3000
2
1500
3
1000
4
750
5
600
6
500

T ba date :
Ph. Georges Sciences 3/5
IV- Glissement
Le rotor tourne à une fréquence n inférieure à la fréquence de synchronisme ns.
La différence de fréquence ns – n est dite fréquence de glissement.
Le glissement g est le rapport de la fréquence de glissement par la fréquence de synchronisme.
g = Error!
ou
g = 1 – Error!
V- Bilan des puissances - Couple transmis - Rendement
Pa = UI 3 cos
pjs =
Error!
r I2
r : résistance entre 2 bornes
Pt = Pa – pjs – pfs
Mem : moment du couple électromagnétique
pjr = g Pt
Pu = Mem – pm
Pu = Pt (1 – g) – pm
Pu = Mu
Les pertes fer rotoriques dépendent du
produit g f
Comme g est très faible, elles sont négligeables en marche normale.
Pertes Joule rotoriques : pjr = Pt – pméca = Mem s – Mem. = Mem ( .s – ) = g Mem.s = g Pt
Les pertes magnétique et mécanique sont souvent associées. Elles sont constantes à fréquence
d'alimentation invariable et peuvent par conséquent être mesurées à vide. Ce sont les "pertes
collectives".
Pertes Joule statoriques
Montage en étoile
Montage en triangle
Résistance
r (mesurée entre deux bornes)
R (d'un enroulement)
2 R
Error!
Error!
Error!
pertes Joule
pour chaque enroulement
R.I2
R.J2
pour le système triphasé
3 R.I2
3 R.J2 = R.I2
Puissance ABSORBÉE
électrique
Pa
Rotor
Pertes Joule
Puissance UTILE
mécanique
Pu
Stator
Pertes Joule
Puissance TRANSMIS E
au rotor
Pt = Mem
S
Stator
Pertes fer
Rotor
Pertes mécaniques

Ph. Georges Sciences 4/5
Error! rI²
Error! rI²
VI- Couplage du moteur asynchrone triphasé
Un moteur porte sur la plaque signalétique une indication du type 230/400 V.
La première valeur, 230 V, indique la tension normale aux bornes d'un enroulement statorique.
Si l'on dispose d'une alimentation 230/400 V, chaque enroulement doit être soumis à la tension
simple V = 230 V et le moteur est par conséquent branché en "étoile".
1- Couplage étoile
Les bornes normalisées U1, V1, W1 sont souvent repérées U, V, W et les bornes normalisées U2, V2, W2
repérées X, Y, Z.
2- Couplage triangle
VII- Indications portées sur la plaque signalétique
Tension entre phases suivant le couplage.
Intensité par phase suivant le
couplage.
Fréquence de rotation en tr/min.
Puissance disponible sur l'arbre moteur :
la puissance mécanique utile.
Moment du couple exprimé en m.daN
Température donnée en degré Kelvin.
Indice de protection IP
1er chiffre : protection contre les poussières
2ème chiffre : protection contre l'eau
3ème chiffre : protection contre les chocs mécaniques
PHG MOTORS
Mot.as MEUL 280 M 4
N° FL 512 825
~
3
Cos
0,87
kW 90
Cl F
100
K
50 Hz
IP 54
640
kg
V
230
280
A
V
400 Y
157
A
/min
1480
S 1
Rot
V
A
Cl
SAYROMP
MADE IN FRANCE IEC 34.1
U
U1 + W2
W1 + V2
V1 + U2
U1 V1 W1
U2 V2W2
U1 V1 W1
W1
U1 V1 W1
U2 V2
W2 V1
U2 + V2 + W2
U1
U
V

T ba date :
Ph. Georges Sciences 5/5
Exemples : IP 237 moteur protégé IP 447 moteur fermé IP 557 moteur étanche
1
/
5
100%