Mouvement parabolique dans un champ de pesanteur

16/04/2017 769775079 1/4
NOM : ................................................
Prénom : ................................................
Classe : TS …
TS
Thème : Comprendre
TP n°17
Physique
Mouvement parabolique dans un champ de pesanteur uniforme
Chap.6
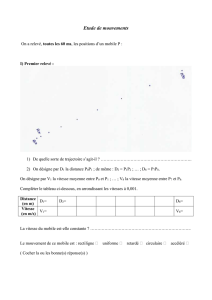
Objectifs : observer le mouvement parabolique d’une balle dans le champ de pesanteur supposé uniforme.
Modéliser les différentes représentations du mouvement ;
Comparer les expressions théoriques du mouvement avec les expressions numériques du mouvement.
Matériel : ordinateur ; notice de Regressi, vidéo du lancer d’une balle.
Acquisition du mouvement
Lire page 4 la notice pour acquérir le mouvement d’une balle de tennis dans le champ de pesanteur.
Sauvegarder votre fichier dans vos documents à intervalles de temps réguliers (touche raccourci F2)
En cliquant sur Grandeurs puis Variables, on doit obtenir un tableau comportant 3 colonnes :
t (en s), x (en m) et y (en m).
Cliquer sur l’icône Graphe. En cliquant sur Coord., vérifier que la case axes orthonormés soit décochée.
I. Equations expérimentales horaires et cartésienne du mouvement
L’équation cartésienne de la trajectoire est de la forme y = f(x).
Une équation horaire est une grandeur fonction du temps t (par exemple x = f(t))
La masse de la balle est m = 56,4 g. Les frottements sont supposés négligeables.
1. Représentation de la trajectoire : y = f(x)
La trajectoire du ballon correspond à y = f(x)
1.1. Visualiser y = f(x). Que peut-on dire de la trajectoire du ballon ?
Modéliser cette courbe : y(x) = A * x^2 + B * x puis Ajuster. Voir ci-contre.
1.2. Noter les valeurs de A et B trouvées par l’ordinateur dans le tableau du § II.
Appeler le professeur pour vérifier vos résultats ou pour une aide
2. Représentation de x = f(t)
2.1. Visualiser seulement x = f(t). Quelle est l’allure de la courbe ?
Modéliser cette courbe : x(t) = C * t . Cliquer sur Ajuster.
2.2. Noter la valeur de C trouvée par l’ordinateur dans le tableau du § II. Préciser l’unité du résultat.
3. Représentation de y = f(t)
3.1. Visualiser y = f(t). Quelle est l’allure de la courbe ?
Modéliser cette courbe du type : y(t) = D * t^2 + E * t puis Ajuster.
3.2. Noter les valeurs de D et E dans le tableau du § II. Préciser l’unité des résultats.
4. Composante horizontale de la vitesse
La composante horizontale de la vitesse est définie par vx =
Error!
4.1. Créer cette grandeur notée Vx en précisant ses unités.
4.2. Cliquer sur l’icône Graphe. Visualiser Vx = f(t). Que pouvez-vous dire de la composante horizontale de la
vitesse ?
Modéliser cette courbe : Vx(t) = F puis Ajuster.
4.3. Noter la valeur de F trouvée par l’ordinateur dans le tableau du § II. Préciser l’unité du résultat.
Appeler le professeur pour vérifier vos résultats ou pour une aide

16/04/2017 769775079 2/4
5. Composante verticale de la vitesse
La composante verticale de la vitesse est définie par vy =
Error!
5.1. Créer cette grandeur notée Vy en précisant ses unités.
5.2. Cliquer sur l’icône Graphe. Visualiser Vy = f(t) Que pouvez-vous dire de la composante verticale de la
vitesse ?
5.3. A quel instant cette vitesse s’annule-t-elle ? Noter cette valeur tM.
Modéliser cette courbe : Vy(t) = G * t + H puis Ajuster.
5.4. Noter les valeurs de G et de H trouvées par l’ordinateur dans le tableau du § II. Préciser l’unité des résultats.
II. Conclusion
1) Compléter le tableau suivant avec les valeurs de chaque groupe.
Table n°
1
2
3
4
5
6
7
8
9
Moy
A (............ )
B (............ )
C (............ )
D (............ )
E (............ )
F (............ )
G (............ )
H (............ )
2) Noter la valeur moyenne de chaque grandeur.
3) Calculer l’incertitude élargie de répétabilité U (à 95%) sur une seule grandeur (A, B, ..) : U = k
Error!
k = 2,45 pour n=7 ; k = 2,37 pour n=8 ; k = 2,31 pour n=9
Appeler le professeur pour vérifier votre résultat ou pour une aide
4) Comparer C et F puis E et H et enfin D et G.
III. Equations théoriques horaires et cartésienne de la trajectoire
La masse de la balle est m = 56,4 g. Les frottements sont supposés négligeables.
1. Equations horaires théoriques
1.1. Quel est le système étudié ?
..............................................................................................................................................................................
1.2. Quel est le référentiel utilisé ?
..............................................................................................................................................................................
Le repère utilisé est un repère (Oxydant) avec l’axe (Ox) horizontal et l’axe (Oy) vertical ascendant.
A la date t = 0, la position du ballon est en O.
Le vecteur vitesse initiale est noté
Error!
0 inclinée d’un angle avec l’horizontale.
1.3. Faire un schéma à l’instant initial (t = 0)
1.4. Quelle est (sont) la (les) force(s) extérieure(s) au système ? Les frottements sont supposés négligeables.
..............................................................................................................................................................................
..............................................................................................................................................................................

16/04/2017 769775079 3/4
1.5. Appliquer la 2ème loi de Newton et déterminer les composantes (ax ; ay) du vecteur accélération
Error!
G du
centre d’inertie.
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
1.6. Par intégration, voir Outils mathématiques page 4, déterminer les composantes (vx ; vy) du vecteur vitesse
Error!
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
1.7. Par intégration, voir Outils mathématiques page 4, déterminer les composantes (x ; y) du vecteur position
Error!
.
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
1.8. Par identification, déterminer les expressions littérales de C, D, E, F, G et H.
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
1.9. Calculer les valeurs initiales (à t = 0) de v0x , v0y , v0 et de l’angle d’inclinaison (en degrés) avec
l’horizontale.
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
2. Equation cartésienne de la trajectoire
2.1. Démontrer que l’équation de la trajectoire y = f(x) à partir des équations horaires du mouvement est :
y = -
Error!
x2 + tan() x
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
2.2. Par identification, déterminer les expressions littérales de A et B.
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................
2.3. Retrouver, à partir des valeurs de B et A, l’angle (en °) et la valeur de la vitesse v0.
..............................................................................................................................................................................
..............................................................................................................................................................................
..............................................................................................................................................................................

16/04/2017 769775079 4/4
Acquisition du mouvement
Lancer le logiciel Regressi puis faire Fichier Nouveau Vidéo.
La barre de menus est ci-dessous :
Cliquer sur Ouvrir 1 et charger le fichier Mouvement parabolique champ
pesanteur dans le répertoire de votre classe..
Faire défiler la vidéo 2 puis revenir sur la 1ère image 3.
Faire un zoom de 2 (bouton 4) pour agrandir l’image.
Cliquer sur Origine 5 puis placer l’origine sur le centre de la balle. Les axes
doivent être orientés positivement vers le haut et vers la droite. Voir la forme de
l’icône 6.
Cliquer sur Echelles 6 puis, avec précision, en haut et en bas de la règle
graduée ; indiquer la distance entre les deux points (en m), c’est-à-dire 1.
Cliquer sur Mesures 7 puis cliquer sur la balle sur la 1ère image avec précision ;
l’image suivante s’affiche et ainsi de suite à des intervalles de temps égaux.
Cliquer sur Traiter 8 pour exporter vos données dans Regressi.
Sauvegarder votre fichier à intervalles de temps réguliers.
Retourner à l’énoncé.
Outils mathématiques
3
9
1
2
5
6
4
8
7
1 m
Fonction dérivée
fonction
Maths
Si y’ = Error! = a
(constante)
y = a x + b
avec b une constante définie pour x = 0
PC
Si Error! = a
(constante)
y = a t + b
avec b une constante définie pour t = 0
Maths
Si y’ = Error! = a x + b
y = Error! a x² + b x + c
avec c une constante définie pour x = 0
PC
Si Error! = a t + b
y = Error! a t² + b t + c
avec c une constante définie pour t = 0
Intégration
Dérivation
1
/
4
100%