Si on suppose que le véhicule B est à une position xb en m du

Exemple
Choix du type d’un compensateur
pour le suivi d’une trajectoire par un véhicule
Problématique
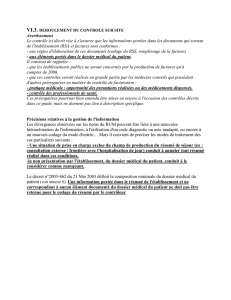
Comme l’indique la Figure 1,un véhicule A doit suivre un véhicule B à une distance d en
m. On suppose que le modèle du véhicule A est donné par la fonction de transfert
suivante :
)/( /1
)( )(
)( mbss m
sF sX
sGp
a
a
où xa est la position du véhicule A par rapport à un point de repère fixe en m, fa est la
force appliquée au véhicule (par le moteur) en N, m est la masse du véhicule en Kg et b
est le frottement visqueux en Ns/m.
Véhicule A Véhicule B
d
Erreur
Figure 1: Description du problème.
Si on suppose que le véhicule B est à une position xb en m du repère fixe, le problème est
alors que le véhicule A suive la référence suivante avec une erreur nulle en régime
permanent :
dtxtr b )()(
On souhaite alors que l’erreur de suivi soit nulle pour chacun des deux cas suivants:
i) En supposant que le véhicule B est arrêté à une position xb fixe en m;
ii) En supposant que le véhicule B est partie à une distance 2d du repère fixe et qu’il
se déplace à une vitesse constante de vb en m/s.

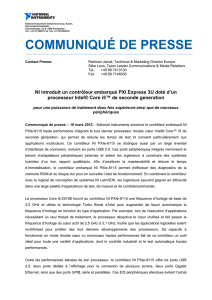
Pour résoudre ce problème dans chacun des cas, on utilise un système de commande par
ordinateur tel que décrit par la Figure 2.
dGp(s)
R* E*
+-
F*
Gc(z) Xa
Bo(s)
T
Véhicule A
Convertisseur
N/A
Convertisseur
A/N
Xa*
Compensateur
numérique
Ordinateur Interface Système à commander
Figure 2: Système de commande par ordinateur.
Le système hybride décrit par la Figure 2, peut être transformée sous la forme
échantillonnée donnée par la Figure 3.
F(z)
R(z)E(z)
+-
Gc(z) C(z)
BoGp(z)
M(z)
Figure 3: Schéma blocs équivalent en z.
Il suffit alors de choisir le type du contrôleur Gc(z) pour assurer une erreur en régime
permanent nulle dans chacun des cas.
Cas i)
Selon la description du problème, la référence est donnée par la relation suivante :
dxtr b)(
où xb est une position fixe en m. Cette référence constante peut être considérée comme un
échelon d’amplitude xb –d. Selon le tableau du calcul des erreurs en régime permanent
(note de cours page 90), le type de F(z) doit être de 1. Le type de Gc(z) doit donc être
donnée par
011))(())(())(( sGpTypezFTypezGcType

Un contrôleur proportionnel P où proportionnel dérivée PD est donc suffisant pour
assurer une erreur nulle en régime permanent. Il serait également possible d’utiliser
d’autres formes de contrôleur sans intégrateur tels les compensateurs en cascade et les
compensateurs polynomiaux que nous verrons au chapitre 7.
Cas ii)
Selon la description du problème, la référence est donnée par la relation suivante :
dtvddvddtxtr b
t
bb 0
2)()(
où vb est la vitesse constante du véhicule B en m/s. Cette référence peut être considérée
comme la somme de deux fonctions : une rampe d’amplitude vb est un échelon
d’amplitude d. Selon le tableau du calcul des erreurs en régime permanent (note de cours
page 90), le type de F(z) doit être 2. Le type de Gc(z) doit donc être donnée par
112))(())(())(( sGpTypezFTypezGcType
Un contrôleur proportionnel intégrale PI où proportionnel intégrale dérivée PID est donc
suffisant pour assurer une erreur nulle en régime permanent. Il serait également possible
d’utiliser d’autres formes de contrôleur avec intégrateur tels les compensateurs en
cascade et les compensateurs polynomiaux que nous verrons au chapitre 7.
1
/
3
100%