Espace R n Limite et continuité des fonctions d`une partie de R p

Dans tout ce chapitre, n et p sont deux entiers naturels non nuls.
I Normes sur un R-espace vectoriel
Pour ce paragraphe, E désigne un R-ev.
A) Norme (rappels)
Définition :
Une norme sur E, c’est une application N de E dans
R
vérifiant :
)()()(,,)2(
)()(,,)2(
)00)((,)1(
yNxNyxNEyx
xNxNEx
xxNEx
R
Il résulte aisément des propriétés (1), (2), (3) que si N est une norme sur E, on a :
)(...)()()...(,,...,
)()()()()(,,
)()(,
)00)((,
212121 nnn xNxNxNxxxNExxx
yNxNyxNyNxNEyx
xNxNEx
xxNEx
Notation : une norme quelconque sur E est souvent notée .
B) Distance associée à une norme
On suppose que E est muni d’une norme notée . Pour tous x, y de E, on pose :
xyyxd ),(
.
Alors d est une distance sur E, c'est-à-dire que d est une application de
EE
dans
R
vérifiant :
),(),(),(,,,
),(),(,,
0),(,,
zydyxdyxdEzyx
yxdxydEyx
yxyxdEyx
On dit que d est la distance associée à la norme .
C) Exemples de normes sur
n
R
.
Pour chaque xde
n
R
, on notera
),...,( 21 n
xxxx
.
L’application
2
définie sur
n
R
par
22
2
2
1
2... n
xxxx
est une norme
sur
n
R
: c’est la norme naturelle.
L’application
définie sur
n
R
par
i
ni xx ,1
max
est aussi une norme sur
n
R
.
En effet,
est à valeurs dans
R
, les propriétés (1) et (2) sont évidentes, et
pour le (3) :
Soient
n
yx R,
.
Pour tout
ni ,1
, on a
yxyxyx iiii
, d’où
yxyx
.
Espace Rn
Limite et continuité des fonctions d’une partie de Rp dans Rn.

D) Partie bornée, fonction bornée
Soit une norme sur E.
Etant donnée une partie A de E, on dit que A est bornée pour la norme
lorsqu’il existe
RM
tel que pour tout x de A, on a
Mx
.
Etant donnée une fonction f à valeurs dans E et définie sur un ensemble
quelconque D, on dit que f est bornée pour la norme lorsqu’il existe
RM
tel que pour tout x de D, on a
Mxf )(
, autrement dit lorsque
fIm
est une partie bornée de E pour la norme .
E) Boules
Soit une norme sur E.
Définition :
Pour tout
EA
, et tout
Rr
, on appelle boule ouverte de centre a et de rayon r
pour la norme la partie
),( raB
définie par
raxExraB ,),(
.
Et on appelle boule fermée de centre a et de rayon r pour la norme la partie
),( raB
définie par
raxExraB ,),(
.
Remarque :
Si
0r
,
),( raB
est vide et
),( raB
est réduit à
a
mais si
0r
,
),( raB
n’est
pas vide (contient par exemple a)
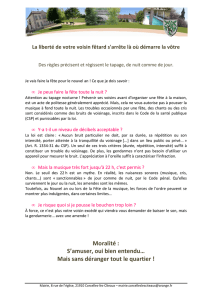
Exemple :
Des boules de centre O et de rayon 1 dans
2
R
O1
1
O1
1
Pour la norme Pour la norme
2
F) Normes équivalentes
Définition :
Soient
1
N
et
2
N
deux normes sur E. On dit que
1
N
et
2
N
sont équivalentes
lorsqu’il existe
*
Ra
tel que
)()(, 21 xaNxNEx
et
*
Rb
tel que
)()(, 12 xbNxNEx
.
Il est évident que cette relation est une relation d’équivalence sur l’ensemble des
normes sur E, c'est-à-dire qu’elle est réflexive, symétrique et transitive.
Exemple :
Dans
n
R
, les normes
2
et
sont équivalentes.
En effet, pour chaque
),...,( 21 n
xxxx
de
n
R
, on a, en posant
i
ni
pxx ,1
max
:
222
2
2
1
2... pnp nxxxxx
, c'est-à-dire
xnxx 2
.
En fait, sur
n
R
, toutes les normes sont équivalentes, ce qui résulte du théorème :
Théorème (admis) :
Dans un R-ev de dimension finie, toutes les normes sont équivalentes.
Proposition :

Soient
1
N
et
2
N
deux normes équivalentes sur E, et soit A une partie de E. Alors
A est bornée pour
1
N
si et seulement si A est bornée pour
2
N
. (Immédiat)
Par conséquent, dans
n
R
, le caractère borné est indépendant du choix de la norme.
Proposition :
Si
1
N
et
2
N
sont deux normes équivalentes sur E, alors toute boule ouverte non
vide pour
1
N
contient une boule ouverte non vide et de même centre pour
2
N
, et vice-
versa.
Démonstration :
Notons
),(
1
B
les boules ouvertes pour
1
N
et
),(
2
B
les boules ouvertes pour
2
N
.
Soit
0
1
tel que
)()(, 211 xNxNEx
Alors, pour tout
Ea
et tout
0r
, on a
),(),( 12 1raBaB r
(car si
1
)(
2
r
axN
, alors
raxN )(
1
).
Et on peut refaire la même chose en échangeant 1 et 2.
II Eléments de topologie de
n
R
.
Soit une norme sur
n
R
. Toutes les boules considérées sont pour cette norme.
A) Voisinages d’un point de
n
R
.
Soit a un élément de
n
R
.
On appelle voisinage de a (dans
n
R
) toute partie U de
n
R
qui contient une boule
ouverte non vide de centre a.
D’après l’équivalence des normes sur
n
R
, cette définition est indépendante du
choix de la norme.
Proposition :
Toute partie de
n
R
qui contient un voisinage de a est un voisinage de a
(stabilité par extension)
Toute intersection finie de voisinages de a est un voisinage de a (stabilité par
intersection finie)
Etant donnés deux éléments distincts a et a’de
n
R
, on peut toujours trouver un
voisinage de a et un voisinage de a’ qui ne se rencontrent pas (séparation des
voisinages)
Démonstration :
- Soit D une partie de
n
R
contenant un voisinage V de a.
Comme V est un voisinage de a, il contient une boule ouverte non vide de centre a,
par exemple
),(
aB
. Alors
DVaB ),(
, donc D contient une boule ouverte non
vide de centre a (à savoir
),(
aB
), donc est un voisinage de a.
- Soit
Kii
V
)(
une famille de voisinages de a, indexée par K fini.
Notons
Ki i
VV
.
Pour tout
Ki
, soit
i
tel que
ii VaB ),(
(il en existe car
i
V
est un voisinage
de a).Alors, pour
i
Ki
min
, on a
ii VaBaBKi ),(),(,
. (En effet, pour tout
Ki
, si
),(
aBx
, alors
ax
, donc
i
ax
, soit
),( i
aBx
)
Donc
Ki i
VaB
),(
. Donc
VaB ),(
, donc V est un voisinage de a.
- Soient a, a’ deux éléments distincts de
n
R
.
Soit
0
tel que
2
'aa
.

Alors
),'(),(
aBaB
.
En effet, supposons que
),'(),(
aBaB
.
Soit alors
),'(),(
aBaBx
.
Alors
ax
soit
xa
et
'ax
. Donc
2'' axxaaa
ce qui est impossible car
2
'aa
.
Pour la suite, on notera
)(aVn
l’ensemble des voisinages, dans
n
R
, d’un point a
de
n
R
.
B) Ouverts de
n
R
.
Définition :
Soit
une partie de
n
R
. On dit que
est ouverte lorsque
est voisinage de
chacun de ses points.
Compte tenu de la définition de voisinage, on a donc aussi l’équivalence :
est ouverte
),(,0,
aBa
.
La notion est indépendante du choix de la norme, puisqu’elle ne dépend que de la
notion de voisinages.
Exemple :
Les boules ouvertes sont ouvertes :
Soit
),(
aB
une boule ouverte.
Soit
),(
aBx
. Donc
ax
. Soit alors
0
tel que
ax
.
Alors
),(),(
aBxB
. En effet :
Soit
),(
xBy
. Alors
axxy
Donc
axxy
.
Or,
axxyaxxy )()(
.Donc
ay
, donc
),(
aBy
, d’où
l’inclusion. Donc
),(
aB
est un voisinage de x.
Donc
),(
aB
est voisinage de chacun de ses points, donc ouverte.
et
n
R
sont aussi ouverts.
Proposition :
Toute réunion d’ouverts est un ouvert.
Toute intersection finie d’ouverts est un ouvert.
Démonstration :
Soit
Iii
)(
une famille d’ouverts indexée par un ensemble I.
Notons
Ii i
.
Soit
x
. Il existe alors
Ii
tel que
i
x
. Comme
i
est ouvert, il existe
0
tel que
i
xB ),(
. Comme
i
, on a donc
),(
xB
.
Donc
est voisinage de x. C’est valable pour tout
x
. Donc
est ouvert.
Soit maintenant
Kii
)(
une famille d’ouverts indexée par un ensemble K fini.
Notons
Ki i
.
Soit
x
. Alors
i
xKi ,
.
Pour tout
Ki
, on pose alors
i
tel que
ii
xB ),(
(ce qui est possible car les
ensemble sont ouverts)
Posons
i
Ki
min
. Alors
ii
xBxBKi ),(),(,
. Donc
),(
xB
.
D’où le résultat.
Proposition :
Soient n intervalles ouverts
n
III ,..., 21
de R.

Alors le produit cartésien
n
III ...
21
est un ouvert de
n
R
.
Une telle partie est appelée un pavé ouvert.
Démonstration :
Soit
),...,( 21 n
aaaa
un élément de
n
III ...
21
.
Alors, pour chaque k entre 1 et n,
k
a
est élément de l’intervalle ouvert
k
I
, donc il
existe
0
k
tel que
kkkkk Iaa [,]
.
Si on pose
k
nk
,1
min
, alors on a bien
0
et la boule ouverte de centre a et de
rayon
pour la norme
est contenue dans
n
III ...
21
.
En effet, soit
),(
aBx
(où on a noté
),(
B
une boule ouverte pour
)
Alors
ax
, donc
kk
nk ax
,1
max
, où
),...,( 21 n
xxxx
.
Donc
kkx axnk
,,1
. Donc
kkkkkk Iaaxnk [,],,1
.
Donc
n
IIIx ...
21
.
Donc
n
III ...
21
est un voisinage de a.
Donc
n
III ...
21
est ouvert.
C) Fermés de
n
R
.
Soit F une partie de
n
R
. On dit que F est un fermé lorsque le complémentaire de
F dans
n
R
est un ouvert.
Exemples, propositions :
Les boules fermées sont fermées.
n
R
et
sont fermés (et ce sont les seules parties à la fois ouvertes et fermées)
Toute intersection de fermés est un fermé, toute réunion finie de fermés est un
fermé.
Tout produit cartésien de n intervalles fermés de R est un fermé de
n
R
(qu’on
appelle un pavé fermé de
n
R
).
Démonstration :
Soit
),(
aB
une boule fermée. Notons
son complémentaire dans
n
R
.
Ainsi,
axx n,R
.
Soit
x
. Soit
0
tel que
ax
.
Alors
),(
xB
. En effet, soit
),(
xBy
.
Alors
ax
xyxaxyxaxyxaay )()(
Donc
y
. Donc
est un voisinage de x. Ce résultat est valable pour tout x,
donc
est ouvert.
Les complémentaires de
n
R
et
sont respectivement
et
n
R
qui sont
ouverts, donc sont fermés.
Soit
Iii
)(
une famille de fermés indexée par un ensemble I quelconque. Si
on note
Ii i
, Alors
Ii i
nn CC
)()( RR
, donc
est une réunion
d’ouverts qui est un ouvert. On fait le même raisonnement pour une réunion
finie de fermés.
Soient n intervalles fermés
n
III ,..., 21
de R.
Soit
le complémentaire dans
n
R
de
n
III ...
21
.
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%