le concept vojta - E

LE CONCEPT VOJTA
HISTORIQUE
C’est dans les années cinquante, en Tchécoslovaquie, que Vaclàv VOJTA,
neurologue intéressé par la rééducation motrice, a entrepris le long cheminement
qui partait des premiers tatonnements empiriques pour déboucher sur le concept
thérapeutique actuel. Cette démarche s’est poursuivie en Allemagne où V. Vojta
avait émigré dès 1968. De Munich, un réseau international de collaborateurs et de
formateurs s’est progressivement développé en Europe et dans le monde entier.
La recherche engagée par le Professeur V. Vojta a toujours comporté deux voies
paralléles :
* L’investigation neurologique, devait aboutir à l’élaboration d’une méthodologie
évaluative du développement de l’enfant, de sa dynamique, et de ses principaux
troubles.
* V. Vojta a toujours considéré le système nerveux comme un système ouvert, doté
d’une organisation basale phylogénétique mais aussi d’une réceptivité aux
stimulations de diverses natures susceptibles d’influer sur son fonctionnement et
même sur sa maturation anatomique.
La “locomotion réflexe” concrètise physiquement la conjugaison de ces deux
aspects complémentaires; elle constitue l’axe majeur d’un protocole thérapeutique
original qui s’est dabord adressé aux affections du système nerveux central chez
l’enfant (infirmité motrice d’origine cérébrale).
Au fil des années, l’affinement constant de l’observation et du raisonnement
théorique, reposant sur l’expérience pratique d’une équipe dynamique de plus en
plus nombreuse et opérant dans de multiples secteurs d’activité, a contribué à un
élargissement considérable du champ des indications: affections neurologiques
centrales ou périphériques de l’enfant depuis le stade néonatal comme de l’adulte,
et la majorité des affections mettant en cause l’appareil locomoteur.
OBJECTIFS
La “Méthode" Vojta constitue pour le mèdecin un précieux outil clinique
d’évaluation du développement chez l’enfant dés la naissance, et un élément fiable

de diagnostic; elle est pour le physiothérapeute une thérapie globale performante
exploitable dés les premiers jours de la vie, dans un but préventif ou curatif.
Le traitement basé sur la locomotion réflexe contribue à:
* Infléchir l’activité réflexe du jeune enfant et orienter son développement
neuromoteur dans une direction plus physiologique, par l’induction d’une
activité neurologique centrale différente qui procure au patient un vécu corporel
nouveau. La proprioception y joue un rôle important.
* Modifier les automatismes spinaux dans les lésions médullaires.
* Contrôler la respiration de maniére à augmenter la capacité vitale.
* Contrôler les réactions neurovégétatives, et favoriser une croissance
harmonieuse de l’appareil locomoteur.
* Prévenir la dégradation orthopédique fréquente dans les situations
pathologiques sévères.
FONDEMENTS THÉORIQUES , MOYENS
A- ASPECTS MÉDICAUX
V. Vojta propose une méthodologie d’évaluation clinique du développement en
trois volets:
1 - Étude de la réactivité posturale automatique:
Le test d’une batterie de réactions globales à des changements inopinés de position
du corps dans l’espace (7 à 11 réactions testées), permet de mettre en évidence
toute perturbation dans la gestion automatique des mécanismes posturaux par le
Système Nerveux Central (SNC). La transformation progressive de ces réactions au
cours de la première année de vie, dans le contexte d’un développement normal, est
parfaitement codifiée, leur examen permet, non seulement de signaler les anomalies
fonctionnelles d’origine centrale ou périphérique, mais aussi, de préciser le niveau
de développement atteint au moment de l’examen.
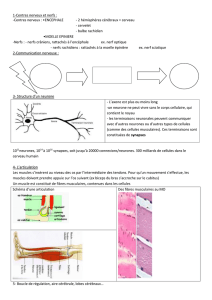
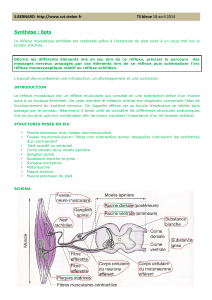
Figure 1 - Evaluation de la réactivité posturale:
exemple des 3 principaux
stades de la réaction de
Vojta. Les tests consistent
en un changement
inopiné de la position du

corps dans l’espace (ici une inclinaison latérale rapide), qui induit une réaction de
l’axe rachidien et des membres (ici ceux du dessus). La réaction normale se
transforme au cours de la première année selon des modalités précisément
codifiées. Il est donc possible de discerner une réaction normale pour l’âge, d’une
réaction traduisant un retard ou d’une réaction erronée traduisant un déficit de
coordination centrale.
2- Analyse cinésiologique de la motricité spontanée:
Chaque stade d’un développement normal se caractérise par des conduites
répondant à des finalités précises (orientation, appropriation, locomotion, etc...);
ces besoins fondamentaux engendrent la mise en oeuvre de stratégies locomotrices
automatiquement adaptées au contexte postural du moment.
L’originalité de la méthodologie Vojta est de définir clairement le contenu
cinésiologique de ces stratégies locomotrices; autrement dit, les attitudes, les
polygones de sustentation, les mouvements caractérisant les principales étapes d’un
développement optimal sont précisément définis; la distinction entre une multitude
de variantes individuelles et les composants posturaux fondamentaux est clairement
faite, autorisant ainsi leur recherche systématique chez le patient et la comparaison
avec d’éventuels succédanés pathologiques.
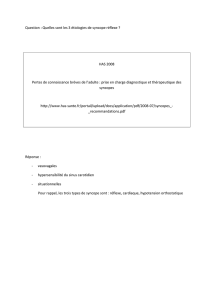
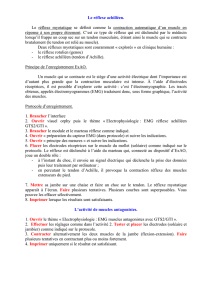
Figure 2: Enfant sain, âge de 3 mois:
En decubitus ventral, le bébé dégage automatiquement
les membres supérieurs et construit un polygone de
sustentation triangulaire, avec appui symétrique sur les
deux coudes qui autorise l’élévation de la ceinture
scapulaire et du thorax supérieur pour hisser la tête
librement dans l’espace, hors de ce polygone.
Ce mécanisme postural automatique, entièrement
asservi à l’appétence visuelle, contribue à l’orientation dans l’espace, il comporte
un ensemble de synergies musculaires très précises de l’axe rachidien et de la
ceinture scapulaire assurant le redressement, la symétrie et la stabilisation de ces
régions corporelles, qui garantira la rotation coordonnée
de la tête. L’activation artificielle de ces synergies est
possible dès la naissance dans le cadre de la locomotion
réflexe.
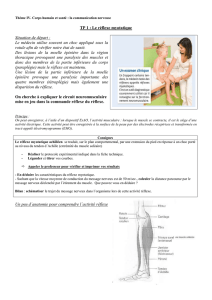
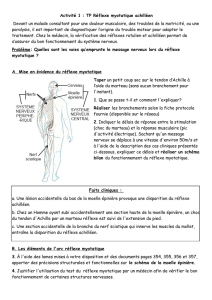
Figure3: Bébé sain, âge de 4,5 mois: En décubitus
ventral, l’enfant doit libérer le membre supérieur qui se
destine à la préhension. Il y parviendra en dégageant
latéralement le membre inférieur homolatéral pour
constituer un nouveau point d’appui au genou, qui vient
automatiquement se substituer à l’appui en voie de disparition sur le coude
homolatéral . Le polygone de sustentation s’en trouve modifié. Cette opération
concrétise l’apparition d’une diagonale d’appui (d’un coude au genou opposé); en
cela elle annonce les formes ultérieures de locomotion: quadrupédie croisée,

marche.
L’émergence automatique de ce schème postural global est une condition préalable
au bon déroulement de la préhension en position ventrale à la quelle il est asservi.
Ce schème postural comprend des synergies musculaires très précisément
coordonnées, impliquant la musculature paravertébrale, du tronc et des membres;
ces jeux musculaires sont présents également dans le ramper réflexe que l’on peut
déclencher dès la naissance à partir de stimulations adéquates.
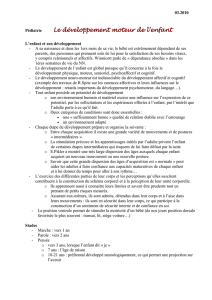
Figure 4: Enfant infirme moteur d'origine
cérébrale:
Le schème global de l’appui sur un seul
coude n’a jamais été accessible, le membre
inférieur n’est pas dégagé pour constituer
l’appui au genou car la rotation vertébrale
coordonnée nécessaire à ce mouvement
n’est pas réalisée. La préhension se déroule
selon un schème postural de substitution, fondamentalement différent du schème
illustré par la fig. 3. Une rééducation fonctionnelle sollicitant fréquemment une
telle activité contribue à pérenniser la procédure posturale pathologique, en
délivrant au système nerveux central un flux afférent propioceptif erroné...
3 - La réflexologie:
Une série de réflexes sélectionnés dans la littérature médicale, dont les modalités de
déclenchement, les réponses et l’interprétation sont précisément décrites, viennent
compléter le schéma d’examen pour affiner l’évaluation immédiate mais aussi pour
préciser le pronostic.
En effet le suivi à long terme de nombreux enfants a montré que la présence ou
l'absence de ces réflexes, leur qualité, leur durée de validité, pouvaient être
corrélées à différentes filières de développement.
La sévérité du “trouble de coordination centrale “ (TCC) est appréciée en
fonction du nombre de réactions posturales anormales, et de l’éventuelle
conjugaison avec des aberrations de la réflexologie (dépassement des périodes
normales de validité des réflexes, réponses qualitativement anormales etc...).
La confrontation de ces trois types de données permet de classer les TCC en
plusieurs catégories, dont les plus bénignes ne justifient pas la mise en place d’une
physiothérapie, comme l’a montré l’étude statistique à postériori, réalisée sur
d’importantes séries de patients.
Les TCC moyens ou sévères, correspondent à un risque majeur d’affection
invalidante (infirmité motrice d’origine cérébrale, ou autres affections), et
justifient donc la thérapie précoce.
Les T.C.C légers peuvent être l’expression d’affections sensorielles ou
psychomotrices diverses, relevant ou non d’un syndrôme défini, et justifiant une
surveillance attentive de l’évolution ultérieure ou la poursuite d’investigations

médicales plus approfondies.
C’est dire l’importance de cette classification qui aide le mèdecin à prescrire
précocément la physiothérapie chaque fois qu’elle est indispensable, à éviter les
prescriptions inutiles, à prévoir des investigations complémentaires éventuelles.
Le TCC est une situation transitoire, traduisant déjà l’imperfection fonctionnelle
du SNC, dont il convient de quantifier la sévérité pour préciser l’indication
thérapeutique. plus d'info. sur le T.C.C.
B - LA PHYSIOTHÉRAPIE
Elle repose sur les notions de locomotion réflexe et de frayage.
V.Vojta a décrit (1954) des conduites motrices globales, ou schèmes,
déclenchables chez le patient spastique: c’est en réalisant des mouvements contre
résistance dans la région axiale du corps ( tronc, tête, articulations-clés de hanche,
d’épaule) qu’apparaissaient des synergies musculaires particulières, se propageant
au reste du corps. Le contenu cinésiologique du schème variait en fonction de la
position initiale du corps, mais le phénomène paraissait organisé et reproductible.
Il présentait en particulier un caractère réciproque, comparable à celui des
différentes formes de locomotion.
L’analyse des activités musculaires impliquées (synergies) a montré qu’elles étaient
les éléments d’un ensemble à vocation locomotrice évidente.
L’observation de ces mouvements contre résistance chez le spastique fixé,
annonçait la découverte des systèmes locomoteurs globaux et innés que sont le
ramper réflexe et le retournement réflexe. La locomotion réflexe est exploitée
depuis 1959 pour le traitement des affections motrices de l’enfant, elle fut
ultérieurement utilisée pour prévenir l’installation de ces affections chez le
nourrison.
Les schèmes de locomotion réflexe (ramper R. et retournement R.) sont globaux,
c’est à dire qu’au cours de leur déroulement, l’ensemble de la musculature striée
est activée selon un mode coordonné. Le SNC est impliqué dans cette activation à
ses différents niveaux. La locomotion réflexe est déclenchée à partir de stimulations
spécifiques (pressions) appliquées sur des zones définies.
Figure 5: Position initiale du ramper réflexe et situation générale des zones:
La position de tête
détermine la position des
membres, différente côté
visage et côté nuque.
Le ramper réflexe est obenu
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%