Cas τ1<τ2

GUINDRE Eric NRJ Série B-3
MONTAT Arnaud
Conception Et Réalisation
De Systèmes Electroniques
Asservissement de Position à Découpage

2
Générateur
d’impulsion
τ2 = f (θ)
Capteur de
position
Réducteur
Moteur
Comparateur
Logique
Commande
Logique
Impulsion
d’ entrée τ1
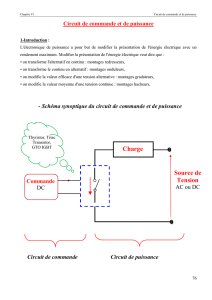
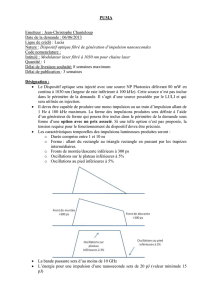
A. Synoptique du dispositif
Le montage est destiné à asservir la position angulaire de l’arbre de sortie d’ un
moto réducteur miniature (servomoteur) proportionnellement à une consigne τ1 qui est la
durée d’une impulsion d’entrée de période T (1ms< τ1< 2 ms et T ≈ 20 ms ).
Pour ce faire le montage génère une impulsion également de période T dont la
durée τ2 est image de la position réelle de l’arbre. Suivant le signe du terme τ1- τ2, le système
délivre un courant faisant tourner le moteur dans le sens adéquat jusqu’à la position de l’arbre
correspondant à la consigne τ1.
On obtient alors le schéma de principe suivant :
B. Cahier des charges
Tension d’alimentation unique : + 5V.
Courant de sortie : 300mA crête.
Fréquence de multiplexage (1/T) entre 40 et 60hz ( en excluant 50 hz) afin de
permettre la transmission de 8 à 9 voies.
τ1 entre 1 ms et 2 ms pour les positions minimale et maximale du capteur de position.
Le capteur de position est un potentiomètre d’environ 5 kΩ.
Temps de réponse : le plus petit possible.

3
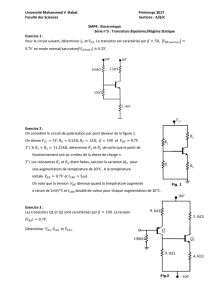
C. Schéma du système

4
D. Description du fonctionnement
Pour l’explication globale du circuit ainsi que les calculs, nous diviserons
l’ensemble du montage en quatre parties.
La première partie correspondra à l’utilisation du monostable CD 4538 qui
fonctionnera en générateur d’impulsion τ2.
Nous aurons ensuite une deuxième partie du montage associée aux circuits
logiques 74HC00 et 74HC03 qui fonctionneront en comparateur logique des
impulsions τ1 et τ2.
La partie suivante, appelée circuit allongeur, transformera un signal de 50μs en
un signal de 5 à 8 ms.
Pour finir le circuit puissance permettra la commande du moteur dans les deux
sens de rotations par l’intermédiaire des quatre transistors.
1) Le générateur d’impulsion
Le monostable CD 4538 nous permet de générer une impulsion de période T dont
la durée τ2, image de la position réelle de l’arbre. Le déclanchement s’effectuera sur le front
montant de l’impulsion d’entrée τ1 (τ1 étant notre consigne d’entrée).
2) Le comparateur logique
Cette deuxième partie du montage est composée de portes NAND « classiques »
intégrées dans un 74HC00 et de portes NAND de type « collecteurs ouverts » intégrées dans
le 74HC03. Le but de cette partie est la comparaison de τ2 par rapport à la consigne τ1 afin, de
définir le sens de rotation du moteur au travers de circuit allongeurs.
3) Le circuit allongeur
Ce montage va nous permettre, à partir du signal de sortie délivré par la porte NAND,
de transformer une impulsion de 50μs en une impulsion de 5 à 8 ms. En effet afin de
commander le moteur une durée d’impulsion minimum est nécessaire (en fonction de la
constante de temps mécanique du moteur).
L’impulsion de sortie du circuit allongeur commandera la partie puissance de notre
circuit par l’intermédiaire d’une porte NAND à collecteur ouvert.
4) Le circuit de puissance
Les portes à collecteur ouvert CI3-D et CI3-C, dont l’entrée réagit à l’impulsion du
circuit allongeur, commande la rotation du moteur par l’intermédiaire des transistors T3, T4P
pour un sens et T3P, T4 pour l’autre sens.

5
E. Dimensionnement des éléments du montage
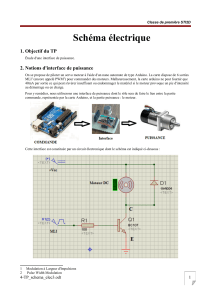
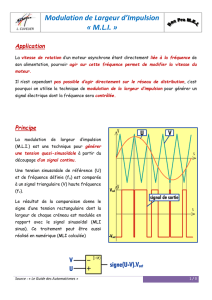
1) Le générateur d’impulsion
Schéma du CD 4538
Les caractéristiques du composant nous indiquent que la longueur de l’impulsion τ2 sera
déterminées par le calcul suivant :
Le capteur de position Rc est un potentiomètre d’environ 5kΩ.
On a en entrée (consigne) :1ms ≤ τ1 ≤ 2ms.
Pour qu’il puisse y avoir une différence entre τ1 et τ2 ,il faut donc - τ2 max=(R4+Rc)*C2 >2ms
- τ2 min=R4*C2 <1ms
En prenant arbitrairement R4=2.2kΩ, on a donc
277 nF < C2 < 454 nF
Finalement, nous devrons nous rapprocher des valeurs suivantes pour la réalisation de notre
maquette
0 ≤ Rc ≤ 5.103
R4 = 2.2 kΩ
C2 = 330 nF
2) Le comparateur logique
Schéma du montage :
τ2 = (Rc + R4) . C2
Avec : τ2 en secondes
Rc en ohm
R4 en ohm
C2 en Farad
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%