énoncé

Spé y 2008-2009 page 1/4 Devoir n°1
Spé y 2008-2009 Devoir n°1
MÉCANIQUE DU POINT ; ÉLECTROCINÉTIQUE
Exercice I
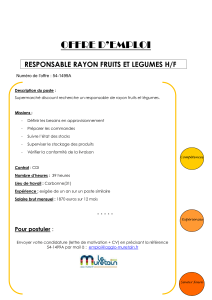
Le circuit représenté sur le schéma ci-contre est alimenté par
une source de tension de force électromotrice sinusoïdale de pulsation
w = 100 p rad.s–1 et de valeur efficace E0 = 220 V. La résistance R est
variable et L0 = 1H.
1) Exprimer la puissance moyenne P calculée sur une période
qui est absorbée par la résistance R.
2) Calculer la valeur R0 de R pour laquelle la puissance P est maximale.
3) Calculer L1 lorsque P a sa valeur maximale PM sachant que R0 = 12 W.
4) Calculer dans ces conditions la valeur maximale PM de P.
5) Pour une valeur R1 de R (R
1
> R0), la puissance délivrée par le générateur vaut
P1 = 1936 W. Calculer R1 en adoptant désormais pour L1 la valeur trouvée précédemment.
6) Calculer la valeur de C pour que, lorsque R = R1, la tension aux bornes du générateur soit
en phase avec le courant qu’il débite.
Exercice II
On désigne par R’(O’, x’, y’, z’) un repère d’origine O’ dont
les axes orthogonaux O’x’, O’y’ et O’z’ sont repsectivement paral-
lèles aux axes Oxy et Oz d’un repère R(O, x, y, z) que l’on suppose-
ra galiléen.
Un pendule simple est constitué d’un point matériel P de
masse m, suspendu à l’origine O’ de R’ par un fil sans masse ni
raideur et de longueur ℓ. On note q l’angle que fait le fil, que l’on
supposera constamment tendu, avec la verticale Oy de R.
On prendra pour norme de l’accélération de la pesanteur
r
g
= –g
r
e
Y la valeur g = 9,8 m.s–2.
1) Dans un premier temps, l’origine O’ de R’ reste fixe et confondue avec l’origine O de R.
Exprimer la période T0 des oscillations de très petites amplitudes puis calculer la longueur du fil ℓ
telle que cette période est égale à une seconde.
2) L’origine O’ et le repère R’ sont maintenant animé d’un mouvement de translation recti-
ligne uniformément accéléré d’accélération constante
r
r
a
a
e
=
X
.
a) Calculer le moment
r
r
M
O
IE
'
( )F par rapport au point O’ de la force d’inertie
d’entraînement
r
F
IE qui s’applique au point P dans le référentiel R’.
b) Calculer le moment
r
r
M
O
IC
'
( )F par rapport au point O’ de la force d’inertie de Co-
riolis
r
F
IC qui s’applique au point P dans le référentiel R’.
c) Déduire du théorème du moment cinétique appliqué en O’ dans R’ au point P
l’équation différentielle vérifiée par l’angle q.
d) Déterminer la valeur q0 de l’angle q correspondant à la position d’équilibre du
pendule.
E0 L0 C
L1
R
y y’
x
x’
q
r
e
X
r
e
Y
r
e
Z ¤
O O’
r
g

Spé y 2008-2009 page 2/4 Devoir n°1
e) Exprimer la période T des oscillations de très petite amplitude autour de la posi-
tion d’équilibre q0 en fonction de ℓ, a et g.
Problème
La planète Saturne est assimilée à un corps à répartition sphérique de masses, de centre OS,
de masse mS = 6´1026 kg, de rayon RS . On suppose que le référentiel saturnien, de point fixe OS et
en translation circulaire par rapport au référentiel héliocentrique, est galiléen. On note G la cons-
tante de gravitation.
LES ANNEAUX DE SATURNE NE SONT PAS DES SOLIDES
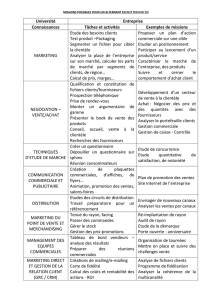
Supposons qu’un anneau soit un agglomérat solide de corps (rochers, cailloux, blocs de
glace), en rotation uniforme à la vitesse angulaire w autour de Saturne. On isole deux de ces corps
formant un doublet d = (M1, M2), de
faible taille à l’échelle astronomique, de
centre d’inertie G, de même masse m, à
la distance 2a l’un de l’autre . On sup-
pose, en outre, que :
Ÿ OS, M1 et M2 restent alignés en
permanence ;
Ÿ on pose r
eO G
O G
r
S
S
=
¾ ®¾
, O G re
S
r
¾ ®¾
=r,
q = wt et on définit le repère cylindrique
(
r
e
r,
r
e
q,
r
e
Z) ;
Ÿ il vient O M r a e
S
r
1
¾ ®¾
= -( )r et
O M r a e
S
r
1
¾ ®¾
= +( )r ;
Ÿ a << r ;
Ÿ le référentiel RSd = (OS,
r
e
r,
r
e
q,
r
e
Z) est appelé référentiel saturno-doublet : c’est un référen-
tiel non galiléen en rotation uniforme par rapport au référentiel saturnien, à la vitesse angulaire w et
dans lequel OS, G, M1 et M2 sont immobiles.
On néglige l’influence de tous les autres corps de l’anneau sur le système d.
1.1) Établir l’identité G
m
r
r
S
2
2
= w
1.2) Faire l’inventaire de toutes les forces subies par M1 dans RSd, y compris les éventuelles
forces d’inertie, et montrer que leur somme vectorielle peut s’écrire rr
F f a r e
å=( , ) r : on donnera
l’expression de f(a, r) comme une fonction des variables a et r et des paramètres G, m et mS .
1.3) Montrer que cette fonction a pour valeur approchée : f a r m
a
m ma
r
( , ) = -
G G
2
2 3
4
3S au pre-
mier ordre en
a
r
<< 1.
1.4) Il y aura dislocation progressive de l’anneau si la résultante des forces a tendance à
éloigner M2 de M1. Montrer que cette condition se traduit par l’existence d’une valeur minimale r0
de r (on l’appelle limite de Roche) ne dépendant que de mS et de m =
m
a
3. On donne m = 720 kg·m–3.
Déduire de ce qui précède un ordre de grandeur de r0. Conclure en considérant que les anneaux ont
un rayon de l’ordre de 108 m.
r
e
r
r
e
q
¤
r
e
Z
OS
q
r
´
G
M1
M2
a
a

Spé y 2008-2009 page 3/4 Devoir n°1
Dans ce qui suit, on assimile tous les corps autour de Saturne à des petits et moyens blocs
solides indépendants en orbite circulaire et on néglige toutes les forces d’interaction entre eux de-
vant l’attraction gravitationnelle de la planète.
DIVISIONS DES ANNEAUX
Les anneaux sont divisés : la première division fut observée par Cassini qui détecta
le premier une bande circulaire vide de blocs, et découpant ainsi « l’anneau » en deux anneaux
distincts (cette division est encore appelée division Cassini). On en a détecté un très grand nombre
depuis.
On s’intéresse ici à la division observée sur le rayon orbital d’un petit satellite sphérique,
PAN, de centre OP, de rayon RP et de rayon orbital rP = OSOP.
Le référentiel saturno-Pan RSP est en rotation uniforme autour du référentiel saturnien, sui-
veur du mouvement de PAN, dans lequel OS et OP restent fixes. On considère deux petits rochers A
et B encore présents dans cette bande et tournant dans le même sens (cf. figure 3). A est en orbite
circulaire de rayon rA légèrement inférieur à rP, B est en orbite circulaire de rayon rB légèrement
supérieur à rP.
2.1) Montrer que plus le rayon de l’orbite circulaire d’un corps satellisé autour de Saturne
est grand, plus sa vitesse le long de son orbite est faible.
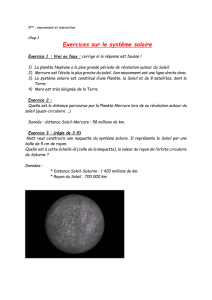
2.2) Tracer, sur la figure 3.a, dans le référentiel saturnien, l’allure des vecteurs vitesses des
centres des trois corps (l’échelle est arbitraire).
2.3) En déduire, dans le référentiel RSP, l’allure des vecteurs vitesses de A et de B et les tra-
cer sur la figure 3.b.
2.4) En déduire pourquoi A et B ne pourront rester sur leur orbite et pourquoi on dit que PAN
« nettoie » la bande décrite par sa trajectoire en dessinant une division dans les anneaux.
PAN
division
B
A
PAN
figure 3a
Référentiel saturnien
B
A
PAN
figure 3b
Référentiel saturno-Pan

Spé y 2008-2009 page 4/4 Devoir n°1
1
/
4
100%