tp1_robot_virtuel

ICN Année 2015-2016
TP1 Nao
Première approche de Choregraphe avec le robot virtuel
1. Ouvrir le logiciel Choregraphe. Dans l’onglet « Connection», cliquer sur «Connect to a virtual robot».
2. a) Regarder dans la fenêtre «Box libraries» à gauche (si elle n’est pas affichée, la faire apparaitre en la
sélectionnant dans l’onglet « View »).
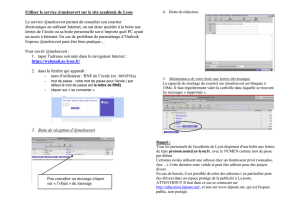
Dans « Audio /Voice », glisser déposer dans la zone centrale la boite « Say ».
Dans la fenêtre en bas à gauche, vous pouvez avoir une description de cette boîte.
Pour exécuter cette boite, vous devez la connecter à la petite flèche noire à gauche « onStart ». Les
boîtes seront exécutées séquentiellement dans l’ordre où elles sont connectées. La dernière boite devra-
t-être connectée à la petite flèche noire à droite « onStopped ».
Pour finir, cliquer sur le bouton vert « Play ».
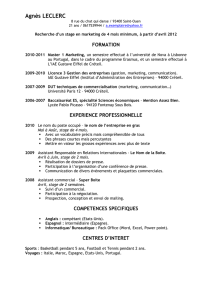
b) Double cliquer sur la boite « Say ». Une boite « Localized Text » apparait reliée à la boite « Say ».
Modifier la langue et le texte. Pour retourner à l’écran précédent, cliquer sur « Root » dans la ligne de
progression puis cliquer sur le bouton vert « Play ».
c) En cliquant sur la clé à molette de la boite « Say », on peut modifier les différents paramètres de la
boite. Malheureusement, on ne peut pas le tester sur le robot virtuel…
A quoi correspondent ces différents paramètres ?

d) Quand on double-clique sur la boite « Localized Text » ou la boite « Say », on obtient le code
Python. Observez les indentations. Quels mots-clefs reconnaissez-vous ?
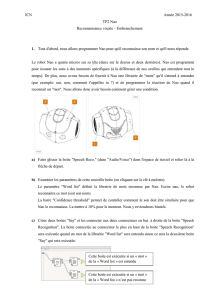
3. a) Regarder «Box libraries» à gauche. Dans « Motions », glisser déposer dans la zone centrale la boite
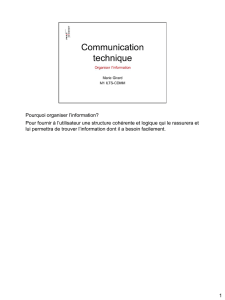
« Move To ». Cliquer sur la clé à molette pour avoir les paramètres de la boite.
Les figures ci-dessous indiquent les repères correspondants.
Faire différents essais et observer :
-laisser exactement deux paramètres à 0
-laisser Theta à 0 et modifier x et y
-essayer des valeurs négatives
b) Ecrire un programme permettant à Nao de faire un carré de côté 50 cm en marchant puis de s’asseoir
quand il a fini.
4. Pour les plus avancés :
Nous allons créer une nouvelle boite permettant à Nao de faire un polygone régulier à n côtés dont un coté
mesure x mètres.
a) Cliquer droit dans la fenêtre centrale et sélectionner « Create a new box/Python ».
b) Donner lui un nom, une description. Vous pouvez changer l’image.
c) Créer deux nouveaux paramètres : un entier n (Integer) et un réel positif x (Float).
d) Cliquer sur OK. Votre nouvelle boite apparait dans l’espace de travail avec l’image sélectionnée.
e) Double cliquer sur la boite afin d’ouvrir le « Script Editor ». Cet éditeur montre le code Python qui
est exécuté par votre boite.
Regarder la ligne qui dit : def onInput_onStart(self). Cette ligne est la définition d’une fonction
(méthode) nommée onInput_onStart. Cette fonction est appelée quand la boite est exécutée. Nous
allons modifier cette fonction pour faire avancer et tourner le robot comme nous le souhaitons.
f) A la place de pass, écrire les lignes de code suivantes (attention à l’indentation !)
motionProxy=ALProxy("ALMotion")
x=self.getParameter("x")
motionProxy.moveTo(x,0.0,0.0)
self.onStopped()
La première ligne crée un objet motionProxy qui nous permet d’appeler des fonctions permettant à
Nao de se déplacer. La seconde ligne permet de récupérer la valeur du paramètre X et d’initialiser
la variable x avec cette valeur. La troisième ligne appelle la méthode moveTo qui permet au robot
de se déplacer suivant une distance définie. Les trois arguments sont les mêmes que ceux de la
boite « MoveTo » : (X, Y, theta) mais theta est exprimé en radians.
La nouvelle boite étant créée, essayer là sur le robot virtuel.
g) Modifier le code de la fonction onInput_onStart afin que Nao fasse un polygone régulier à n côtés
dont un coté mesure x mètres.
1
/
2
100%