Exo-Spécialiste 2

PHYSIQUE 2
Partie 1 Excès de vitesse ?
Document 1 : Texte officiel sur le cinémomètre MESTA 208
Le radar, acronyme de Radio Détection And Ranging (« détection et estimation de la distance par onde radio »),
utilise l'effet Doppler pour mesurer la vitesse d'un véhicule. Une antenne émet une onde électromagnétique
puis capte sa réflexion par le véhicule en mouvement. La comparaison de ces deux ondes permet de remonter
à la vitesse du véhicule.
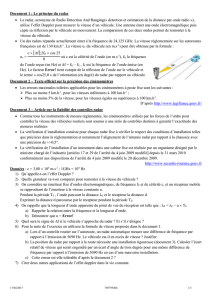
La vitesse v du véhicule (en m.s-1) peut être obtenue par la formule :
Les radars MESTA 208 les plus répandus actuellement émettent à la fréquence fR= 24,125 GHz.
Document 2 : Texte officiel sur la précision des cinémomètres
Les erreurs maximales tolérées pour les cinémomètres à poste fixe sont les suivantes :
-plus ou moins 5 km.h-1 pour les vitesses inférieures à 100 km.h-1
-plus ou moins 5% de la vitesse, pour les vitesses égales ou supérieures à 100 km.h-1
1. Qu’appelle-t-on l’effet Doppler ? Citer un exemple qui illustre cet effet.
2. Calculer la longueur d’onde d’émission du radar. Vérifier que cette onde est bien dans le domaine des
ondes centimétriques.
3. Lors d’un contrôle routier sur autoroute, un radar mesure une fréquence supérieure de 6,45 kHz par
rapport à la fréquence de l’onde émise par le radar. La vitesse réglementaire sur autoroute est de 130 km.h-1.
a. Cette voiture s’approche-t-elle ou s’éloigne-t-elle du radar ? (justifier)
b. La voiture est-elle en excès de vitesse ? (justifier)
4. Réglementairement, l’appareil doit être tourné à 25 degré par rapport à l’axe de la route.
a. Calculer l’écart de vitesse engendré par un écart d’angle de 3 degrés supplémentaires.
b. Cette erreur est-elle tolérable d’après le document 2 ?
Rappels : La célérité du son dans l’air est égale à 340 m.s-1 et celle de la lumière égale à 3,00.108 m.s-1
1 m.s-1 = 3,6 km.h-1
c : célérité de l’onde émise (en m.s-1)
𝒇𝑹∶ Fréquence de l'onde reçue (en Hz)
𝒇𝑬∶ Fréquence de l'onde émise (en Hz).
Le facteur 2 tient compte de la réflexion de l'onde sur le
véhicule et le terme cos(25,0) de l'orientation (en degré)
du radar par rapport au véhicule.
𝐯 = c
|𝑓𝑅−𝑓𝐸|
𝟐.𝑓𝑅.cos(25,0)

Partie 2
L’expansion de l’Univers
En 1929 Edwin Hubble découvre que l’ensemble de l'Univers est en expansion en analysant le spectre de la
lumière venant de différentes galaxies.
Principe de l'analyse des spectres :
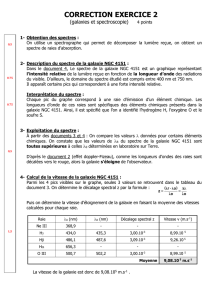
Lorsqu’on observe par exemple les raies d’absorption du sodium gazeux d'une source immobile depuis la Terre,
on y observe, entre autre, une raie intense nommée D1 à une longueur d'onde de 589,0 nm.
Or, dans le spectre de la galaxie NGC 37 observé depuis la Terre, on mesure cette raie D1 à 607,2 nm.
1.1. La raie D1 dans le cas de NGC 37 est-elle décalée vers le rouge ou vers le bleu ? Justifier.
1.2. Comment nomme-t-on alors un tel décalage ?
1.3. En déduire si NGC 37 se rapproche de notre galaxie ou si elle s’en éloigne.
2. Donner avec l'écriture scientifique la valeur d'un angström en mètre.
3. Le décalage spectral z de la longueur d’onde d’une raie pour une source en mouvement est donné par la
relation :
REF
REF
z
a) Calculer z
b) Déterminer la vitesse à laquelle la galaxie NGC 37 se déplace par rapport à nous sachant que le décalage
z se calcule aussi par la relation :
c
v
z
avec : v la vitesse de la galaxie par rapport à la Terre
c la vitesse de la lumière dans le vide
c) z est proportionnel à la distance d de la galaxie. z =
0
Hd
c
où H0 est une constante appelée constante de
Hubble. Calculer la distance qui nous sépare de, la galaxie NGC 37
Ho est la constante de Hubble : Ho = 70 km.s-1.Mpc-1.
Mpc est le symbole du mégaparsec et pc est le symbole du parsec : 1 pc = 3,26 a.l.
avec :
la longueur d'onde de la raie pour la source mobile
REF la longueur d'onde de la raie pour une source immobile.
Edwin Hubble (1889 - 1953)
Quelques raies d'absorptions du Sodium pour
une source immobile
Raie D1
Raie D2
5840 5850 5860 5870 5880 5890 5900
angströms
1
/
2
100%