Physique des matériaux : Partie Polymères

PHYSIQUE DES MATÉRIAUX :
PARTIE POLYMÈRES
Pr. J. Lecomte-Beckers
Chapitre 6 : Rhéologie des matériaux polymères
1

CHAPITRE 6 : RHÉOLOGIE DES MATÉRIAUX POLYMÈRES
6.0 Aspects phénoménologiques de l’élasticité
6.0.1 Introduction
La théorie de l’élasticité étudie la relation entre les déformations subies par un objet et les
forces qui lui sont appliquées.
Pour les petites déformations, l’analyse du comportement élastique d’un matériau se
ramène à l’étude d’un certain type de déformations simples et à la détermination des
constantes élastiques correspondantes.
2
Types de déformations
Constantes élastiques
Extension uniaxiale
E (Module de Young)
Cisaillement simple
G (Module de cisaillement)
Compression uniforme
K (Module de compressibilité
volumique)

CHAPITRE 6 : RHÉOLOGIE DES MATÉRIAUX POLYMÈRES
6.0 Aspects phénoménologiques de l’élasticité
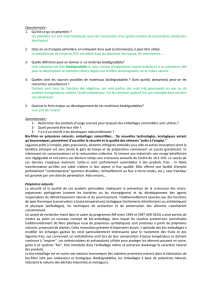
6.0.2 Extension uniaxiale
Si on applique une force de traction F sur une éprouvette prismatique
Allongement de l’éprouvette proportionnellement à sa longueur initiale x0
Apparition d’une force de rétraction Frqui est égale
en valeur absolue et de sens opposée à la force
appliquée F :
Si on se limite aux petites déformations (max 0.1%) :
E (Module de Young ou d’élasticité) caractérise la résistance du solide
à la déformation uniaxiale. 3

CHAPITRE 6 : RHÉOLOGIE DES MATÉRIAUX POLYMÈRES
6.0 Aspects phénoménologiques de l’élasticité
6.0.2 Extension uniaxiale (suite)
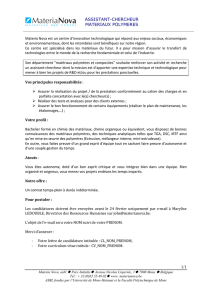
E (Module de Young ou d’élasticité) est lié à :
-l’énergie des liaisons entre atomes
-la nature des forces de rappel élastiques
-la structure du matériau (amorphe,cristallin) 4
E(Diamant)/E(caoutchouc)
= 106/1

CHAPITRE 6 : RHÉOLOGIE DES MATÉRIAUX POLYMÈRES
6.0 Aspects phénoménologiques de l’élasticité
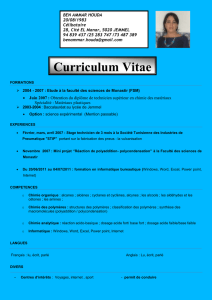
6.0.3 Contraction latérale et coefficient de Poisson
Allongement x de l’éprouvette dans le sens de la traction de son volume
Si déformation élastique compensation partielle de cette augmentation de volume par
contraction latérale de l’éprouvette (Δy et Δz) suivant les directions perpendiculaires à la
traction.
La déformation relative dans les directions y et z s’écrit :
On définit aussi le coefficient de Poisson comme étant :
5
Sont égaux pour un
matériau isotrope
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
1
/
114
100%