http://ch-rahmoune.univ-boumerdes.dz/
Chapitre 1
Introduction au formalisme de
Lagrange
11

http://ch-rahmoune.univ-boumerdes.dz/
Chap 1 Introduction au formalisme de Lagrange
1.1 Introduction
Le formalisme de Lagrange est un outil qui permet d’´ecrire les mˆemes
´equations que lors de l’application du th´eor`eme fondamental de la dynamique
d’une mani`ere plus adapt´ee.
Ce formalisme a pour but de simplifier la mise en ´equation du comportement
dynamique des syst`emes m´ecaniques. En effet, ce formalisme prend en compte
la globalit´e du syst`eme ´etudi´e `a partir de ses ´energies.
1.2 Le degr´e de libert´e d’un syst`eme
1.2.1 Liaisons impos´ees `a un syst`eme
On appelle LIAISON, toute obligation g´eom´etrique ou cin´ematique im-
pos´ee `a un syst`eme. L’effet m´ecanique d’une liaison est de r´eduire le nombre
de param`etres g´eom´etriques ind´ependants qui d´etermine la position du point
(ou du corps) dans l’espace. Une liaison simple r´eduit avec ”un” le nombre
de param`etres g´eom´etriques ind´ependants.
140
x
x1
x2
m1
m2
l2
q1
q2
l1
y1
y2
y
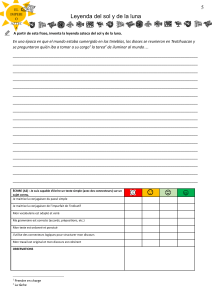
Figure 1.1 – Double pendule
Exemple 1 La configuration du syst`eme est exprim´ee `a l’aide de six pa-
ram`etres : q1=x1,q2=x2,q3=θ1,q4=θ2,q5=y1,q6=y2.
Page 12

http://ch-rahmoune.univ-boumerdes.dz/
Chap 1 Introduction au formalisme de Lagrange
Ce syst`eme pr´esente 04 liaisons :
x1=l1sin θ1
x2=l1sin θ1+l2sin θ2
y1=l1cos θ1
y2=l1cos θ1+l2cos θ2
Ce type de liaisons est appel´ee liaison g´eom´etrique.
q
x
I
G
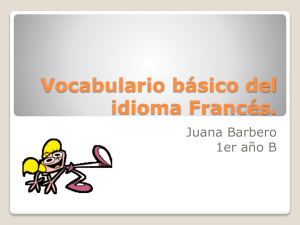
Figure 1.2 – Roulement sans glissement
Exemple 2 le figure 1.2, repr´esente un cylindre en roulement sans glisse-
ment. La condition de roulement sans glissement est donn´ee par :
~
V(I) = ~
V(G) + ~
Ω∧~
GI =~
0
~
V(I) =
˙x
0
0
+
0
0
−θ
∧
0
−R
0
=
0
0
0
d’o`u :
˙x−R˙
θ= 0
Ce type de liaisons est appel´ee liaison cin´ematique.
Page 13

http://ch-rahmoune.univ-boumerdes.dz/
Chap 1 Introduction au formalisme de Lagrange
1.2.2 Degr´e de libert´e d’un syst`eme
Pour d´eterminer la position du syst`eme dans l’espace, il est n´ecessaire de
connaˆıtre un nombre de param`etres g´eom´etriques ind´ependants par rapport
`a un syst`eme de r´ef´erence (distances ou angles).
Supposons que l’on exprime la configuration d’un syst`eme `a l’aide de Npa-
ram`etres et qu’il ait Mliaisons, est appel´e degr´e de libert´e kle nombre :
k=N−M
q
q
q
l1
l2
l3
k
k
m2
m1
m3
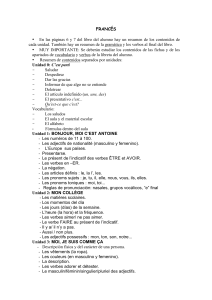
Figure 1.3 – Exemple d’un syst`eme `a un degr´e de libert´e
Exemple La configuration du syst`eme de la figure 1.3 est exprim´ee `a l’aide
de sept param`etres :
q1=x1,q2=x2,q3=x3,q4=y1,q5=y2,q6=y3,q7=θ⇒N= 7.
D’autre part on a six liaisons c.`a.d. M=6.
x1=l1sin θ
x2=l2sin θ
x3=l3sin θ
y1=l1cos θ
y2=l2cos θ
y3=l3cos θ
Le degr´e de libert´e du syst`eme de la figure 1.3 est :
k=N−M= 7 −6 = 1
Page 14

http://ch-rahmoune.univ-boumerdes.dz/
Chap 1 Introduction au formalisme de Lagrange
1.3 Formalisme de Lagrange pour un syst`eme
oscillant
1.3.1 Syst`emes oscillants
Un oscillateur est un syst`eme physique manifestant la variation d’une
grandeur physique de part et d’autre d’un ´etat d’´equilibre. Si les variations
se reproduisent identiques `a elles-mˆemes, l’oscillateur est dit p´eriodique.
Un oscillateur est dit harmonique si la variation de la grandeur physique est
une fonction sinuso¨ıdale du temps.
1.3.2 ´
Equation diff´erentielle du mouvement pour un
syst`eme oscillant `a un degr´e de libert´e
Dans un r´ef´erentiel galil´een, l’acc´el´eration ¨xsubie par un corps de masse
mest proportionnelle `a la r´esultante des forces ext´erieures exerc´ee sur cette
masse.
Le syst`eme de la figure 1.4 est compos´e d’une masse ponctuelle m, d’un
ressort de raideur ket d’un amortisseur de coefficient d’amortissement c.
Le principe fondamental de la dynamique appliqu´e au syst`eme de la figure
k
c
x
F(t)
x
F(t)
-Fk -Fc
m m
Figure 1.4 – Syst`eme masse - ressort - amortisseur
1.4 permet d’´ecrire :
X~
Fext =m¨x⇒ −Fk−Fc+F(t) = m¨x
Page 15
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%