Tp 3 commande motrice 2014

TP 3: La commande de la motricité volontaire
Objectif : Démontrer l’existence d’une commande corticale du mouvement et connaître l’organisation motrice du cerveau
Montrer l’activité intégratrice d’un motoneurone
Activité 1 : Commande corticale du mouvement volontaire et localisation des aires motrices du cerveau
Matériel : - Logiciel « eduanatomist » logiciel de visualisation d’images du cerveau obtenues par exemple par les techniques d’IRMf (Imagerie par
Résonnance Magnétique fonctionnelle). Fiche aide au repérage dans l’espace avec le logiciel Eduanatomist - Fiche technique du logiciel Eduanatomist
Activités et déroulement des activités
Exigences
Comprendre ou proposer une démarche de résolution
1) Proposer une démarche d’investigation permettant de relier l’hémiplégie du patient à un dysfonctionnement de la commande motrice
volontaire par le cerveau.
proposer une
démarche de
résolution.
Utiliser des techniques et Appliquer une démarche explicative
Compléter la fiche fournie (doc 1) en localisant l’emplacement de la lésion occasionnée par l’AVC du patient 12212.
Expliquer en quoi les troubles présentés par ce patient nous permettent de conclure à une commande corticale du mouvement.
Utiliser l’annexe 1 afin de préciser cette localisation.
Situer, sur les images de la fiche réponse (doc 2), les aires motrices mises en jeu dans les tests réalisés sur le patient 13112.
(motricité doigt-index)
A l’aide de l’ Homoculus moteur cf doc 2 p 377, expliquer l’existence d’une « carte motrice » à la surface du cerveau.
Utilisation maîtrisée
des fonctionnalités
du logiciel :
-Ouverture des
fichiers demandés
-Superposition
correcte des images
-Réglage des seuils
de sensibilité
-Repérage des
structures
-Manipulation des
curseurs de coupe
- mise en évidence
de la commande
controlatérale de la
motricité volontaire
2) Lancer le logiciel Eduanatomist.
*Ouvrir le fichier « image IRMsujet12212anatpathologieAVC_T2_J1 » relative au sujet 12212 acquise un jour après la survenue de
l’AVC. Régler le seuil de sensibilité : inf =70 /sup = 38
*Faire défiler à l’aide du curseur les coupes de façon à localiser la zone lésée (rmq : le maillage 3D permet de définir un volume)
3)
* Charger l’image IRMsujet13112 anat (sujet sain) : image du fond anatomique.
Régler le seuil de sensibilité : niveau inférieur 0 et niveau supérieur 40
* Charger et superposer l’image IRMsujet13112fonctionmotriciteMainGaucheVersusDroite : image des tests fonctionnels.
Régler le seuil de sensibilité : niveau inférieur 75 et niveau supérieur 100.
Faire défiler à l’aide des curseurs les coupes de façon à localiser les zones activées dans le cerveau lors de cette action motrice.
(Elles apparaissent en dégradé de bleu à rouge). Relever le « maillage 3D » afin d’apprécier le volume de la zone impliquée.
* Répéter l’opération pour l’image IRMsujet13112fonctionmotriciteMainDroiteVersusGauche.

Activité 2 : Du cerveau aux motoneurones de la moelle épinière
Appliquer une démarche explicative
Les axones des neurones du cortex moteur forment des faisceaux qui se croisent au niveau du bulbe rachidien avant d’établir des
connections synaptiques avec les motoneurones de la moelle épinière.
Compléter le schéma bilan du document 3 en indiquant les structures cérébrales impliquées dans la motricité volontaire et les voies
motrices
en vert : neurones issus du cerveau, en rouge : motoneurones
-Mise en relation des
informations tirées des
différentes observations
-lisibilité du schéma, légendes
et symboles utilisés corrects
Activité 3 : Intégration du message nerveux au niveau du motoneurone
Matériel : Logiciel somspat
Activités et déroulement des activités
Exigences
Comprendre ou proposer une démarche de résolution
1) Proposer une hypothèse expliquant, au niveau cellulaire, pourquoi le réflexe Achiléen n’a pas lieu lors de la contraction
volontaire du jambier avant le choc sur le tendon d’Achille.
Mise en relation des
informations et des
connaissances pour proposer
une hypothèse.
Utiliser des techniques
2) A l’aide du logiciel Somspat, positionner l’électrode réceptrice sur l’axone du motoneurone, et rechercher les
conditions expérimentales permettant d’obtenir une contraction musculaire en utilisant obligatoirement les deux types de
neurones présynaptiques (inhibiteurs et excitateurs) et en considérant que tous les neurones sont actifs.
Compléter le doc 4.
Utilisation maîtrisée des
fonctionnalités du logiciel
Appliquer une démarche explicative
3) Expliquer comment le réflexe myotatique achilléen peut-il être inhibé par la contraction volontaire du muscle
antagoniste : compléter le schéma (doc 5) en représentant le neurone sensitif en bleu, le neurone issu du cortex moteur
en vert et les neurones médullaires : les 2 motoneurones en rouge et l’interneurone inhibiteur en noir.
Préciser par un signe + ou – le type de synapse intervenant.
Tenir compte du fait que la
contraction d’un muscle est
associée au relâchement de
son antagoniste.
Replacer sur le schéma les
neurones impliqués dans la
réalisation du réflexe, et
ajouter le mécanisme
d’inhibition du réflexe



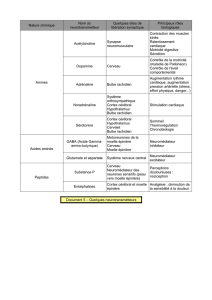
Annexe 1 – Organisation générale du cerveau
Le cerveau ou encéphale comprend :
-deux hémisphères cérébraux réunis par les commissures interhémisphériques.
-le tronc cérébral réalisant la jonction entre le cerveau et la moelle épinière.
-le cervelet en arrière du tronc cérébral.
Deux grands types de tissus sont retrouvés dans le cerveau : la substance grise qui est composée essentiellement
des corps cellulaires des neurones et substance blanche composée des prolongements des neurones. La
substance grise est souvent regroupée en noyaux et est également retrouvée en surface du cerveau au niveau du
cortex.
Morphologie du cerveau
Localisation de la coupe
1
 6
7
8
6
7
8
1
/
8
100%