KEAG9AHU
________
Miniprojet commande numérique d'un
actionneur électrique
Membre du Groupe :
BOURAS Narimene / ALAOUI Aya / Hazymeh Louay.
Année 2024/2025
Encadré par Éric Tournier & David Buso
Introduction
M
a
s
t
e
r
1
E
.
E
.
A
.

La commande numérique des systèmes d’actionnement électrique est un domaine clé qui associe
électronique, informatique industrielle et automatisation pour améliorer l’efficacité. Ce mini-projet
s’inscrit dans cette dynamique en proposant une approche intégrée mêlant simulation, développement
matériel et programmation pour piloter un moteur sans balai (BLDC).
Les moteurs électriques jouent un rôle essentiel dans de nombreuses applications industrielles et
domestiques. Parmi eux, les moteurs sans balai BLDC (Brushless Direct Current) sont particulièrement
prisés pour leur efficacité énergétique, leur durabilité et leur capacité à fonctionner avec un entretien
réduit. Contrairement aux moteurs à courant continu traditionnels qui utilisent des balais pour
commuter l'énergie vers l'induit, les moteurs BLDC reposent sur une commutation électronique, ce qui
les rend plus performants et adaptés à des applications exigeant une précision de contrôle accrue.
Le pilotage et le contrôle de la vitesse des moteurs BLDC sont des défis techniques qui requièrent la
maîtrise de plusieurs disciplines, notamment l'électronique de puissance, l'automatique et
l'informatique embarquée. Pour obtenir un fonctionnement optimal, il est nécessaire d'utiliser des
techniques avancées telles que la modulation de largeur d'impulsion (PWM), l'estimation de vitesse via
des capteurs de position, et l'implémentation de systèmes de régulation efficaces.
Les systèmes modernes exploitent des composants programmables comme les FPGA (Field-
Programmable Gate Arrays) et les microprocesseurs embarqués pour assurer un contrôle précis et
réactif du moteur. Le développement et l'implémentation de telles solutions impliquent également
l'utilisation de logiciels de simulation et de conception, tels que PSIM, Quartus, MATLAB/SIMULINK et
Eclipse, permettant de valider les différentes étapes du processus avant leur mise en application réelle.
Objectif du Projet
Le but de ce projet est de concevoir un système permettant de contrôler précisément la vitesse d’un moteur sans
balais BLDC (Brushless Direct Current). Ce type de moteur est très utilisé dans les domaines industriels et les
véhicules électriques en raison de son rendement élevé et de sa fiabilité. Pour y parvenir, nous allons utiliser une
technique appelée modulation par largeur d’impulsion (PWM), qui permet de réguler la vitesse du moteur en
ajustant le signal électrique qui lui est envoyé.
L’ensemble du système sera géré à l’aide d’une carte électronique DE0-Nano, équipée d’un FPGA Altera Cyclone
IV et d’un microprocesseur NIOS II. Ce projet mobilise différentes compétences en électronique de puissance, en
programmation et en simulation, et repose sur l'utilisation de divers outils logiciels tels que PSIM pour la
simulation, Quartus pour la programmation FPGA, Qsys pour la configuration du microprocesseur et
MATLAB/SIMULINK pour la régulation.
L'objectif principal est de mettre en place un système de pilotage autonome du moteur permettant d’adapter sa
vitesse en fonction des besoins en suivant l’étude du fonctionnement du moteur BLDC afin d’analyser ses
caractéristiques et les différentes méthodes de contrôle disponibles, l’implémentation d’un système de
commande basé sur la PWM pour ajuster la vitesse en modulant le signal envoyé, l’intégration de capteurs
permettant de mesurer et d’estimer en temps réel la vitesse de rotation, le développement d’un algorithme de
régulation garantissant un fonctionnement stable, la programmation en VHDL pour l’FPGA et en C++ pour le
microprocesseur afin de piloter l’ensemble du système ainsi que la simulation et le test du système pour vérifier
sa stabilité et sa précision avant l’implémentation finale.

Ce mini-projet est aussi une occasion d'acquérir et de renforcer des compétences en travail d’équipe, en gestion
de projet et en production de livrables de qualité. Chaque étape a été pensée pour approfondir la compréhension
des interactions entre les différentes disciplines impliquées, notamment l’électronique, l’informatique
industrielle et l’automatique permettant d’allier théorie et pratique pour mieux appréhender les défis liés au
contrôle des systèmes d’actionnement électrique modernes. Grâce à une approche méthodique et l'utilisation
d'outils professionnels, nous pourrons concevoir un système performant et stable, répondant aux exigences de
régulation de vitesse d’un moteur BLDC.
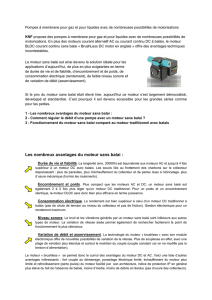
figure : Vue d’ensemble du projet
Déroulement du Projet
Partie 1 : Autopilotage du Moteur BLDC
Dans cette première étape, on se concentre sur la gestion automatique du moteur Brushless (BLDC). Cela
commence par l’étude des équations de commande permettant d’activer les interrupteurs du circuit
d’alimentation du moteur. Une fois ces équations définies, on réalise une simulation du système à l’aide du logiciel
PSIM afin de valider les stratégies de commande envisagées. Ensuite, on met en œuvre la solution en
programmant un FPGA via l’environnement de développement Quartus, ce qui permet d’expérimenter
directement la commande du moteur sur la carte.
Partie 2 : Contrôle de Vitesse avec Modulation PWM
L’objectif de cette phase est de réguler la vitesse du moteur grâce à une technique spécifique appelée Modulation
de Largeur d’Impulsion (MLI ou PWM). Dans un premier temps, on simule cette modulation sous PSIM afin
d’observer son influence sur la vitesse de rotation du moteur. Cette simulation permet d’affiner l’approche avant
de passer à la programmation d’un module PWM sous Quartus, qui génère numériquement le signal de
commande. Enfin, une fois le module implémenté sur la carte FPGA, on effectue des tests pour valider l’efficacité
de cette solution.
Partie 3 : Estimation de la Vitesse et Configuration du Microprocesseur NIOS

Dans cette étape, on estime la vitesse du moteur en utilisant des capteurs de position à effet Hall. Pour cela, on
conçoit un estimateur de vitesse basé sur l’analyse des signaux issus de ces capteurs ainsi que sur l’utilisation d’un
compteur. Ensuite, on configure le microprocesseur NIOS afin qu’il puisse traiter ces informations en temps réel
et les intégrer dans la boucle de régulation. Enfin, on valide le système d’estimation en évaluant sa précision et
sa réactivité, ce qui permet de garantir une mesure fiable de la vitesse du moteur.
Partie 4 : Modélisation et Régulation de la Vitesse
Une fois la vitesse du moteur mesurée, il est essentiel de la réguler afin d’optimiser ses performances. Pour cela,
on commence par modéliser le comportement du moteur en établissant une fonction de transfert qui décrit la
relation entre la tension d’entrée et la vitesse de rotation. À partir de cette modélisation, on conçoit un régulateur
respectant des critères précis, notamment une erreur statique nulle et un dépassement initial limité à 20 %, dans
le but d’obtenir un temps de réponse rapide et une stabilité optimale.
Partie 5 : Test et Validation de la Régulation
Afin de s’assurer du bon fonctionnement du système de régulation, on passe à une phase de test et de validation.
On implémente le correcteur dans le microprocesseur NIOS, puis on analyse son efficacité en comparant les
résultats expérimentaux obtenus avec les prévisions issues des simulations réalisées sous MATLAB/SIMULINK.
Cette comparaison permet d’évaluer la pertinence de l’approche et d’apporter d’éventuelles améliorations pour
optimiser les performances du moteur.
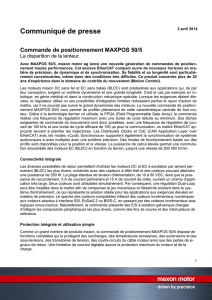
Figure : Organisation des séances
Matériel et Logiciels Utilisés
Pour ce projet, on utilise une plateforme de développement combinant plusieurs composants matériels et
logiciels essentiels à la commande et à la régulation d’un moteur BLDC.
Matériel :
Moteur BLDC : Machine synchrone à aimants permanents nécessitant une commande électronique.
Génératrice à courant continu : Permet de mesurer la vitesse du moteur.
Driver 8312 : Pilote moteur contrôlant l’alimentation des bobines via un signal PWM.
Carte DE0-Nano : Intègre un FPGA Altera Cyclone IV et un microprocesseur NIOS II pour le traitement des
commandes.

Capteurs de vitesse : Utilisés pour estimer la vitesse de rotation du moteur.
Alimentation et circuits de puissance : Fournissent l’énergie nécessaire au système.
Logiciels :
PSIM : Simulation du circuit d’alimentation et du moteur.
Quartus 13 & Qsys : Programmation et configuration du FPGA et du microprocesseur NIOS II.
Eclipse : Développement en C++ et VHDL pour le microprocesseur.
MATLAB/SIMULINK : Conception et test des algorithmes de régulation.
Ce matériel et ces logiciels permettent de concevoir, tester et optimiser la commande du moteur BLDC avec un
contrôle précis et efficace.
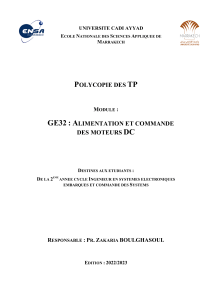
le Moteur BLDC (Brushless DC Motor) :
Le moteur BLDC (Brushless DC Motor) est un moteur à courant continu sans balais qui offre de nombreux
avantages par rapport aux moteurs classiques à balais. Il est plus efficace, plus durable et nécessite moins
d’entretien, car il ne subit pas d’usure mécanique liée aux frottements des balais. Son fonctionnement repose sur
un stator avec des enroulements fixes et un rotor équipé d’aimants permanents, la commutation du courant étant
gérée électroniquement grâce à des capteurs à effet Hall ou des algorithmes d’estimation. Cela permet un
contrôle précis de la vitesse et du couple, notamment avec des techniques comme la modulation de largeur
d’impulsion (PWM). Grâce à son rendement élevé et son faible niveau de bruit et de vibrations, le moteur BLDC
est largement utilisé dans divers domaines, comme l’industrie (automatisation, robotique), l’automobile
(véhicules électriques), l’aéronautique (drones) et même l’électroménager (aspirateurs, ventilateurs). Son
efficacité et sa fiabilité en font aujourd’hui un choix privilégié pour de nombreuses applications nécessitant un
moteur performant et programmable.
figure : Présentation du moteur BLDC
Autopilotage : L’objectif de cette étape est de développer un système d'autopilotage pour un
moteur BLDC (moteur à courant continu sans balais) à travers une série d'étapes incluant à la fois la
simulation et l'expérimentation. Il se structure autour de trois axes principaux : la détermination des
 6
6
1
/
6
100%