Protocole de thèse : Risques de renversement des véhicules au Bénin
Telechargé par
AMOUSSA Yousr

1
REPUBLIQUE DU BENIN
******
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR
ET DE LA RECHERCHE SCIENTIFIQUE
******
UNIVERSITE D’ABOMEY-CALAVI
******
ECOLE POLYTECHNIQUE D’ABOMEY-CALAVI
******
ÉCOLE DOCTORALE DES SCIENCES DE L’INGENIEUR
Protocole de thèse
THEME :
DEVELOPPEMENT D’UN OUTIL DE DETECTION SYSTEMATIQUE DES
RISQUES DE RENVERSEMENT DES VEHICULES « GROS PORTEURS »
SUR LES CHAUSSES DES ROUTES DES PAYS EN DEVELOPPEMENT :
CAS DU BENIN.
Directeur de thèse : Doctorant :
Pr. Guy Clarence SEMASSOU AMOUSSA Yousr
Enseignant chercheur à l’Ecole Polytechnique d’Abomey-Calavi
Enseignant à l’Ecole Doctorale des Sciences De l’Ingénieur

Développement d’un outil de détection systématique des risques de renversement des véhicules « gros
porteurs » sur les chaussées des routes des Pays En Développement (PED) : cas du BENIN
2
Table des matières
1. Introduction ......................................................................................................................... 3
2. Contexte et Problématique .................................................................................................. 5
2.1. Contexte ....................................................................................................................... 5
2.2. Problématique .............................................................................................................. 6
3. Questions de recherche ....................................................................................................... 8
3.1. Question de recherche principale ................................................................................ 8
3.2. Questions de recherche spécifiques ............................................................................. 9
4. Hypothèses de recherche ..................................................................................................... 9
4.1. Hypothèse Principale ................................................................................................... 9
4.2. Hypothèses spécifiques ................................................................................................ 9
5. Objectifs de la thèse .......................................................................................................... 10
5.1. Objectif principal ....................................................................................................... 10
5.2. Objectif principal ....................................................................................................... 10
6. Revue de la littérature ....................................................................................................... 10
7. Outils et Méthodologie ..................................................................................................... 14
7.1. Collecte et analyse des données ................................................................................. 14
7.2. Modélisation du comportement des poids lourds ...................................................... 14
7.3. Conception et réalisation d’un modèle ...................................................................... 15
7.4. Test et validation du modèle ...................................................................................... 15
7.5. Etude d’extension de l’outil ....................................................................................... 15
8. Résultats attendus .............................................................................................................. 15
9. Chronologie des activités .................................................................................................. 16
10. Impact ............................................................................................................................ 10
11. Conclusion ..................................................................................................................... 10
Références Bibliographiques .................................................................................................... 11

Développement d’un outil de détection systématique des risques de renversement des véhicules « gros
porteurs » sur les chaussées des routes des Pays En Développement (PED) : cas du BENIN
3
1. Introduction
Dans son rapport de 2023 sur la situation de la sécurité routière dans le
monde, l’Organisation Mondiale de la Santé (OMS) classe les accidents de la
route au rang de première cause de mortalité chez les enfants et les jeunes âgés de
5 à 29 ans avec une estimation d’environ 1,19 millions de décès en 2021. Ces
chiffres ont tendance à stagner depuis plusieurs années malgré les prévisions à la
hausse ; ce qui pourrait laisser croire que les mesures prises dans le cadre de la
décennie 2011 à 2020 de la sécurité routière initiée par l’OMS, ont permis de
sauver des vies. Mais, en réalité, cette constance s’explique d’une part, par la
baisse du nombre de décès dans certaines régions dont : la région européenne
(réduction de 36 %), la région des Amériques (réduction de 0,1 %), la région de
l’Asie du Sud-Est (réduction de 2 %) et la Région du Pacifique occidental
(réduction de 16 %) ; et d’autre part, par l’augmentation du nombre de décès de
17 % dans la région africaine et de moins de 1 % dans la région de la méditerranée
orientale. (OMS, 2023). La même source nous informe que 13% des décès dus à
des accidents de la route surviennent dans les pays à revenu faible (PRF), alors
qu’ils ne détiennent que 1% des véhicules à moteur immatriculés sur le plan
mondial. Le taux de décès dus à des accidents de la circulation à l’échelle
mondiale est de 15 pour 100000 habitants avec une variation importante selon les
régions, se situant en 2021 entre 7 pour l’Europe et 19 pour l’Afrique.
Cette répartition disproportionnée révèle l’état alarmant de la sécurité
routière en Afrique. Sey (2021), rapporte d’après le ministère des Transports de
la Côte d’Ivoire que 814 personnes ont été tuées sur les routes en 2013, 1465 en
2019 et 1509 en 2020 malgré les restrictions imposées par la Covid-19, soit une
hausse de 79% en 7 ans. Dans la période de 2013 à 2020, l’on observe un
accroissement de 21% pour les accidents, 37% pour les blessés et 79% pour les
tués. En 2018, l'Algérie a enregistré 3310 décès et 23570 blessés dans 2302
accidents de la route (Pape, 2021). Le Nigéria et l'Afrique du Sud enregistrent les

Développement d’un outil de détection systématique des risques de renversement des véhicules « gros
porteurs » sur les chaussées des routes des Pays En Développement (PED) : cas du BENIN
4
taux de mortalité les plus élevés, avoisinant respectivement 33,7 et 31,9 décès
pour 100000 habitants par an. Ces deux pays ainsi que la République
démocratique du Congo, l'Egypte, l'Ethiopie, le Kenya, le Soudan, la Tanzanie et
l'Ouganda ont enregistré en 2010, 63% des 233765 accidents mortels survenus sur
le continent (Small et Runji, 2014). Au Bénin, entre 2010 et 2022, le centre
national de la sécurité routière (CNSR) enregistre chaque année, une moyenne de
5480 accidents de la circulation ayant impliqué 10272 véhicules et engendré 4787
blessés et 794 décès (CNSR, 2024). Une autre étude de la même institution, basée
sur les données de 2010 à 2015, montre que la majorité de ces accidents ont eu
lieu sur les routes inter État puis sur les voies urbaines. Environ la moitié des
personnes impliquées (conducteurs, blessés ou tués) sont des jeunes de plus de 21
ans (CNSR, 2018).
Dans cet état des choses, les poids lourds représentent une part considérable
des accidents de la route. En France, en 2023, l’Observatoire National
Interministériel pour la Sécurité Routière (ONISR) estime que le nombre de
personnes tuées dans un accident impliquant un véhicule utilitaire (VU) ou un
poids lourd (PL) est de 688 (dont 518 hors du VU ou du PL), soit 22 % de la
mortalité routière. Parmi ces tués, 170 étaient dans un VU ou un PL dont 68 %
sur les routes hors agglomération (ONISR, 2023). Au QUEBEC, pour la période
allant de 1995 à 1999, le taux d’accidents pour 100 millions de kilomètres
parcourus a été deux fois et demie plus élevé pour les poids lourds (2,19), à cause
de leur masse, que pour les véhicules légers (0,84) (Bussières et Boumédiène,
2001). Au Bénin, sur la période de 2010 à 2015, la CNSR estime que les occupants
des PL représentaient en moyenne environ 8,5% des tués (CNSR, 2018). Bien
que ce nombre soit faible par rapport à celui des autres types de véhicules, les
poids lourds sont dans la majorité des cas la cause des accidents les plus meurtriers
avec d’énormes dégâts sur les plans économique et social (Babesse, 2017).
La présente étude vise à développer un outil de détection systématique de
risque de renversement des véhicules « gros porteurs » sur les chaussées des routes

Développement d’un outil de détection systématique des risques de renversement des véhicules « gros
porteurs » sur les chaussées des routes des Pays En Développement (PED) : cas du BENIN
5
des Pays En Développement (PED). Cette étude s’inscrit dans une optique
d’apport de solutions techniques dans le domaine de la sécurité routière.
2. Contexte et Problématique
2.1. Contexte
Un poids lourd est un véhicule dont le poids total autorisé en charge
(PTAC) est supérieur à 3,5 tonnes. Cette définition inclut également les véhicules
utilitaires, seuls ou avec remorques, de plus de 3,5 tonnes de PTAC, et les
tracteurs routiers seuls ou avec remorques (Babesse, 2017). Ils sont généralement
classés selon leur conception géométrique : nombre d’unités (tracteur, remorques)
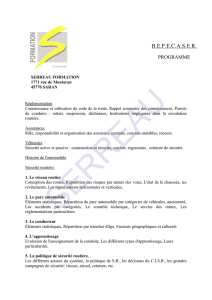
et nombre d’essieux (Sellami Y, 2008). Si l’on fait l’hypothèse que le véhicule
est un corps rigide, qui ne subit pas de déformations, et qu’on le ramène dans un
repère à trois dimensions (figure 1), il présente alors six degrés de liberté dont 3
en translation et 3 en rotation. Les axes du repère sont définis comme suit :
- Un axe longitudinal parallèle à l’axe de symétrie de la caisse, l’axe CX.
- Un axe transversal perpendiculaire à l’axe de symétrie de la caisse, l’axe
CY.
- Un axe orthogonal aux deux axes précédents, l’axe CZ.
En situation de conduite, les mouvements possibles du véhicule sont :
- La translation selon CX définit le mouvement longitudinal du véhicule.
- La translation selon CY définit le mouvement transversal du véhicule et
donc son inclinaison lorsque le dévers est non nul.
- La translation selon CZ définit l’inclinaison du véhicule sur une pente.
- La rotation autour de l’axe longitudinal CX avec un angle φ définit le
mouvement de roulis, ressenti lors de la prise de virages. Le roulis est un
critère décisif dans la prévention du renversement.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%