Exercices supplémentaires
Effet Doppler
EXERCICE 1 : RADARS... ET EFFET DOPPLER
L'effet Doppler fut présenté par Christian Doppler en 1842 pour les ondes sonores puis par Hippolyte Fizeau pour les ondes
électromagnétiques en 1848. Il a aujourd'hui de multiples applications.
Un radar de contrôle routier est un instrument servant à mesurer la vitesse des véhicules circulant sur la voie publique à
l'aide d'ondes radar. Le radar émet une onde continue qui est réfléchie par toute cible se trouvant dans la direction pointée.
Par effet Doppler, cette onde réfléchie possède une fréquence légèrement différente de celle émise : plus grande fréquence
pour les véhicules s'approchant du radar et plus petite pour ceux s'en éloignant.
En mesurant la différence de fréquence entre l’onde émise et celle réfléchie, on peut calculer la vitesse de la «cible».
Mais les radars Doppler sont utilisés dans d'autres domaines…
En météorologie, le radar Doppler permet d'analyser la vitesse et le mouvement des perturbations et de fournir des prévisions
de grêle, de pluies abondantes, de neige ou de tempêtes.
En imagerie médicale, le radar Doppler permet d'étudier le mouvement des fluides biologiques. Une sonde émet des ondes
ultrasonores et ce sont les globules rouges qui font office d'obstacles et les réfléchissent. L'analyse de la variation de la
fréquence des ondes réfléchies reçues par cette même sonde permet ainsi de déterminer la vitesse du sang dans les vaisseaux.
D'après le site : www.over-blog.com
Cet exercice propose d'étudier le principe de l'effet Doppler sonore. Pour simplifier cette approche, la réflexion de l'onde sur
l'obstacle ne sera pas prise en compte.
Par ailleurs, on rappelle que plus la fréquence est élevée, plus le son est aigu.
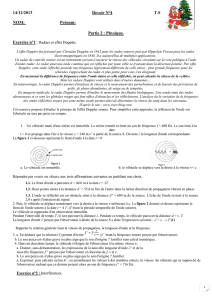
1. Un véhicule muni d'une sirène est immobile.
La sirène retentit et émet un son de fréquence f = 680 Hz. Le son émis à la date t = 0 se propage dans l'air à la vitesse c
= 340 m.s-1 à partir de la source S. On note λ la longueur d'onde correspondante.
La figure 1 ci-dessous représente le front d'onde à la date t = 4 T (T étant la période temporelle de l'onde sonore.)
Figure 1
Répondre par «vrai» ou «faux» aux sept affirmations suivantes en justifiant son choix.
1.1. Une onde sonore est une onde transversale.
1.2. Une onde mécanique se propage dans un milieu matériel avec transport de matière.
1.3. La longueur d'onde est indépendante du milieu de propagation.
1.4. Un point M distant du point S d'une longueur égale à 51,0 m du milieu reproduit le mouvement de la source S avec
un retard Δt =1,5 s.

1.5. Le front d'onde a parcouru d = 40.0 m à la date t = 3T.
1.6. Deux points situés à la distance d’ = 55,0 m l'un de l'autre dans la même direction de propagation vibrent en phase.
1.7. L'onde se réfléchit sur un obstacle situé à la distance d" = 680 m de la source. L'écho de l'onde revient à la source
2,0 s après l'émission du signal.
2. Le véhicule se déplace maintenant vers la droite à la vitesse v inférieure à c.
La figure 2 donnée ci-après représente le front de l'onde sonore à la date t = 4 T.
Figure 2
2.1. Donner la définition d'un milieu dispersif. L'air est-il un milieu dispersif pour les ondes sonores ?
2.2. Le véhicule se rapproche d'un observateur immobile.
Pendant l'intervalle de temps T, le son parcourt la distance λ. Pendant ce temps, le véhicule parcourt la distance
d = v. T.
La longueur d'onde λ' perçue par l'observateur à droite de la source S a donc l'expression suivante :
λ' = λ – v.T (1)
2.2.1. Rappeler la relation générale liant la vitesse de propagation, la longueur d'onde et la fréquence.
2.2.2. En déduire que la relation (1) permet d'écrire f ' = f .
c
cv−
(f ’ étant la fréquence sonore perçue par l'observateur).
2.2.3. Le son perçu est-il plus grave ou plus aigu que le son d'origine ? Justifier.
2.3. Dans un deuxième temps, le véhicule s'éloigne de l'observateur à la même vitesse v.
2.3.1. Donner, sans démonstration, les expressions de la nouvelle longueur d'onde λ" et de la nouvelle fréquence f " perçues
par l'observateur en fonction de f, v et c.
2.3.2. Le son perçu est-il plus grave ou plus aigu que le son d'origine ? Justifier.
2.4. Exprimer, puis estimer en km.h-1, en arrondissant les valeurs à des nombres entiers, la vitesse du véhicule qui se rapproche
de l'observateur sachant que ce dernier perçoit alors un son de fréquence
f ' = 716 Hz.
Exercice 2 DE L’EFFET DOPPLER À SES APPLICATIONS

Christian Doppler
(1803- 1853)
Christophe Buys-
Ballot
(1817-1890)
Christian Doppler, savant autrichien, propose en 1842 une explication de la modification de la fréquence du son
perçu par un observateur immobile lorsque la source sonore est en mouvement. Buys-Ballot, scientifique
hollandais, vérifie expérimentalement la théorie de Doppler en 1845, en enregistrant le décalage en fréquence
d’un son provenant d’un train en mouvement et perçu par un observateur immobile.
On se propose de présenter l’effet Doppler puis de l’illustrer au travers de deux applications.
A- Mouvement relatif d’une source sonore et d’un détecteur
Nous nous intéressons dans un premier temps au changement de fréquence associé au mouvement relatif d’une
source sonore S et d’un détecteur placé au point M (figure 1). Le référentiel d’étude est le référentiel terrestre
dans lequel le détecteur est immobile. Une source S émet des « bips » sonores à intervalles de temps réguliers
dont la période d’émission est notée T0. Le signal sonore se propage à la célérité vson par rapport au référentiel
terrestre.
Figure 1. Schéma représentant une source sonore immobile (cas A), puis en mouvement (cas B).
1- Cas A : la source S est immobile en x = 0 et le détecteur M, situé à la distance d, perçoit chaque bip sonore
avec un retard lié à la durée de propagation du signal.
a- Définir par une phrase, en utilisant l’expression « bips sonores», la fréquence f0 de ce signal périodique.
b- Comparer la période temporelle T des bips sonores perçus par le détecteur à la période d’émission T0.
2- Cas B : la source S, initialement en x = 0, se déplace à une vitesse constante vs suivant l’axe Ox en direction du détecteur
immobile. La vitesse vs est inférieure à la célérité vson. On suppose que la source reste à gauche du détecteur.
Le détecteur perçoit alors les différents bips séparés d’une durée :
0
'1
=−
S
son
v
TT v
Indiquer si la fréquence f ’ des bips perçus par le détecteur est inférieure ou supérieure à la fréquence f0 avec laquelle les bips sont
émis par la source S. Justifier.

B- La vélocimétrie Doppler en médecine
La médecine fait appel à l’effet Doppler pour
mesurer la vitesse d’écoulement du sang dans les
vaisseaux sanguins (figure 2).
Un émetteur produit des ondes ultrasonores qui
traversent la paroi d’un vaisseau sanguin. Pour
simplifier, on suppose que lorsque le faisceau
ultrasonore traverse des tissus biologiques, il
rencontre :
- des cibles fixes sur lesquelles il se réfléchit sans
modification de la fréquence ;
- des cibles mobiles, comme les globules rouges du
sang, sur lesquelles il se réfléchit avec une
modification de la fréquence ultrasonore par effet Doppler (figure 3).
L’onde ultrasonore émise, de fréquence fE = 10 MHz, se réfléchit sur les globules rouges qui sont animés d’une
vitesse v. L’onde réfléchie est ensuite détectée par le récepteur.
La vitesse v des globules rouges dans le vaisseau sanguin est donnée par la relation
.
2 cos
ultrason
E
vf
vf
=
où
Δf est le décalage en fréquence entre l’onde émise et l’onde réfléchie, vultrason la célérité des ultrasons dans le
sang et θ l’angle défini sur la figure 3.
On donne vultrason = 1,57 × 103 m.s-1 et θ = 45°.
1- Le décalage en fréquence mesuré par le récepteur est de 1,5 kHz. Identifier le(s) type(s) de vaisseaux sanguins
dont il pourrait s’agir.
2- Pour les mêmes vaisseaux sanguins et dans les mêmes conditions de mesure, on augmente la fréquence des
ultrasons émis fE. Indiquer comment évolue le décalage en fréquence Δf. Justifier.
Figure 2. Vitesse moyenne du sang dans différents
vaisseaux sanguins.
©2011 Pearson
Figure 3. Principe de la mesure d’une vitesse d’écoulement sanguin par effet Doppler
(échelle non respectée).

C- Détermination de la vitesse d’un hélicoptère par effet Doppler
On s’intéresse à un son émis par un hélicoptère et perçu par un observateur immobile. La valeur de la fréquence
de l’onde sonore émise par l’hélicoptère est f0 = 8,1 × 102 Hz. On se place dans le référentiel terrestre pour toute
la suite de cette partie.
Les portions de cercles des figures 4 et 5 ci-dessous donnent les maxima d’amplitude de l’onde sonore à un
instant donné. Le point A schématise l’hélicoptère. Dans le cas de la figure 4, l’hélicoptère est immobile. Dans
le cas de la figure 5, il se déplace à vitesse constante le long de l’axe et vers l’observateur placé au point O. La
célérité du son dans l’air est indépendante de sa fréquence.
Figure 4. L’hélicoptère est immobile.
Figure 5. L’hélicoptère est en mouvement.
1- Déterminer, avec un maximum de précision, la longueur d’onde λ0 de l’onde sonore perçue par l’observateur
lorsque l’hélicoptère est immobile, puis la longueur d’onde λ’ lorsque l’hélicoptère est en mouvement rectiligne
uniforme.
2- En déduire une estimation de la valeur de la célérité de l’onde sonore. Commenter la valeur obtenue.
3- Déterminer la fréquence du son perçu par l’observateur lorsque l’hélicoptère est en mouvement. Cette valeur
est-elle en accord avec le résultat de la question 2 de la partie A ? Comment la perception du son est-elle modifiée
?
4- En déduire la valeur de la vitesse de l’hélicoptère. Cette valeur vous paraît-elle réaliste.
1
/
5
100%