NAVIRE ELECTRIQUE 2
S2U4ED3
MOTEUR ASYNCHRONE 3 VITESSES
1H
Page : 1 / 4
1. PRESENTATION
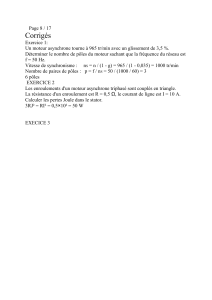
Sur le CAM-CMG Chateau de France, les guindeaux
sont équipés de moteurs à 3 vitesses.
Le tableau ci-contre présente les différentes
configurations de vitesses possibles.
Le DR1 présente un extrait du schéma de câblage.
2. ANALYSE DU SCHEMA
2.1. En observant le schéma de câblage, identifier la source d’alimentation et préciser la valeur efficace
de la tension entre phases et la fréquence des tensions.
2.2. Sur le DR2, rappeler la relation qui lie fréquence de synchronisme, fréquence d’alimentation et
nombre de paires de pôles. Calculer les différentes valeurs de fréquence de synchronisme pour les
différents nombres de paires de pôles proposés.
2.3. Préciser si un guideau doit posséder 2 sens de rotation. En déduire alors la fonction des contacteurs
K1 et K2.
2.4. Donner le nombre d’enroulements qui constituent le bobinage du moteur.
3. FONCTIONNEMENT EN VITESSE BASSE – GEAR 1
Le fonctionnement en petite vitesse est obtenu par couplage des enroulements alimentés par les bornes 1U,
1V et 1W.
3.1. En observant le schéma de câblage, préciser le couplage des enroulements relatif à ce
fonctionnement.
3.2. Donner le contacteur à commander pour obtenir ce fonctionnement.
3.3. À l’aide de la valeur de la fréquence de rotation nominale donnée dans le tableau des configurations,
donner la valeur de la fréquence de synchronisme. En
déduire le nombre de paires de pôles du moteur dans cette
configuration.
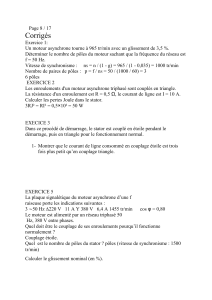
3.4. Comparer cette valeur avec la structure présentée sur la
figure ci-contre.
3.5. Calculer le glissement de la machine et en déduire un
commentaire sur son rendement.
4. FONCTIONNEMENT EN MOYENNE VITESSE – GEAR 2
Les 6 enroulements, s’alimentant par les bornes 2U, 2V, 2W et 3U,
3V,3W sont utilisés pour les vitesses GEAR 2 et GEAR 3.
4.1. À l’aide de la valeur de la fréquence de rotation nominale donnée dans le tableau des configurations,
donner la valeur de la fréquence de synchronisme pour la vitesse basse. En déduire le nombre de
paires de pôles du moteur dans cette configuration.
La vitesse GEAR 2 est obtenue en alimentant les enroulements via les contacteurs K4 et K5.

NAVIRE ELECTRIQUE 2
S2U4ED3
MOTEUR ASYNCHRONE 3 VITESSES
1H
Page : 2 / 4
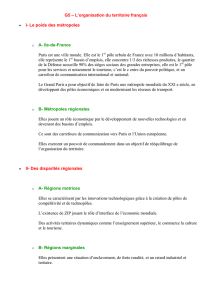
4.2. Sur la figure ci-contre, réaliser les connexions établies par
la fermeture des contacteurs K4 et K5 en indiquant Ph1,
Ph2 et Ph3.
Les enroulements E11-S11 et E12-S12 sont décalés
géométriquement d’1/2 tour mécanique comme le montre la figure
ci-contre.
4.3. En adoptant la convention ci-dessous pour la représentation
des sens des courants dans les enroulements, placer les
sens des courants sur la figure ci-contre.
pour un courant rentrant,
pour un courant sortant.
4.4. En vous appuyant sur la figure du paragraphe 3, définir les
polarités des pôles créés par les enroulements alimentés et
en déduire le nombre de paires de pôles de la machine.
4.5. Calculer le glissement de la machine et en déduire un
commentaire sur son rendement.
5. FONCTIONNEMENT EN VITESSE HAUTE – GEAR 3
5.1. À l’aide de la valeur de la fréquence de rotation nominale donnée dans le tableau des configurations,
donner la valeur de la fréquence de synchronisme pour la vitesse haute. En déduire le nombre de
paires de pôles du moteur dans cette configuration.
La vitesse GEAR 3 est obtenue en alimentant les enroulements via le contacteur K6.
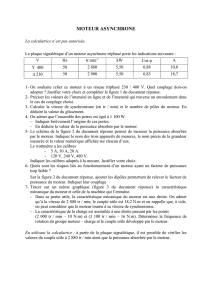
5.2. Sur la figure ci-contre, réaliser les connexions établies par
la fermeture du contacteur K6 en indiquant Ph1, Ph2 et
Ph3.
5.3. En adoptant la même convention de sens des courants que
précédemment, placer les sens des courants sur la
figure ci-contre.
pour un courant rentrant,
pour un courant sortant.
5.4. En vous appuyant sur la figure du paragraphe 3, définir les
polarités des pôles créés par les enroulements alimentés et
en déduire le nombre de paires de pôles de la machine.
5.5. Calculer le glissement de la machine et en déduire un
commentaire sur son rendement.
E11
S12
E21
E31
S22
S32
S11
S21
S31
E12
E22
E32
E11
S12
E21
E31
S22
S32
S11
S21
S31
E12
E22
E32

NAVIRE ELECTRIQUE 2
S2U4ED3
MOTEUR ASYNCHRONE 3 VITESSES
DR1
Page : 3 / 4

NAVIRE ELECTRIQUE 2
S2U4ED3
MOTEUR ASYNCHRONE 3 VITESSES
DR2
Page : 4 / 4
FREQUENCE DE SYNCHRONISME
Relation de base : Fréquence statorique :
Nombre de
paires de
pôles
1
2
3
4
5
6
Fréquence de
synchronisme
tr/min
VITESSE BASSE – GEAR 1
Fréquence de rotation :
Fréquence de synchronisme :
Nombre de paires de pôles :
Glissement :
Commentaire sur le rendement :
VITESSE MOYENNE – GEAR 2
Fréquence de rotation :
Fréquence de synchronisme :
Nombre de paires de pôles :
Glissement :
Commentaire sur le rendement :
VITESSE HAUTE – GEAR 3
Fréquence de rotation :
Fréquence de synchronisme :
Nombre de paires de pôles :
Glissement :
Commentaire sur le rendement :
1
/
4
100%