Travaux Pratiques Microcontrôleur HCS12: Jeux d'Instructions & E/S
Telechargé par
alilou.fanit

Ecole Militaire polytechnique
FASCICULE DE TRAVAUX PRATIQUES
PROCESSEURS ET MICROCONTROLEURS
Préparé pour la Classe :
2e Année ingénieur Génie électrique
Par : Madjid HANK
Maître de Conférences B – EMP,Alger
NB : Une partie de ce fascicule de TP a été préparée et rédigé par : M. Kamel MEGHRICHE (Maître de
conférences A, Université de Boumerdès 2008-2009), qui est reprise et adaptée aux microcontrôleurs
MC9S12DP512 CPVE et MC9S12G256 CPVE depuis 2012Par Madjid HANK (EMP).
Année scolaire : 2024/2025

Ecole militaire polytechnique 2024-2025 TP Processeurs et µ-Contrôleur HCS12
1/13
TP1
Système HCS12
Jeu d’instruction et Modes d’adressage,
Ports d’entrées/sorties, Mécanisme de Pile et Remise à Zéro (RAZ)
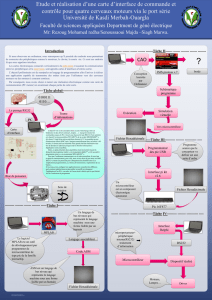
I. Introduction:
L’objectif de ces travaux pratiques est de se familiariser avec le système HCS12 et sa
programmation. Les élèves apprendront, à travers ces travaux pratiques, quelques concepts de
microélectronique appliquée en exploitant un environnement de développement intégré (IDE) et les
fonctionnalités du microcontrôleur 68HCS12 pour développer une application autour du microcontrôleur
MC9S12DG256.
Ce microcontrôleur, géré par un micro-processeur de 16 bits, est doté d’une mémoire interne
volatile (RAM) de 12 Ko et une mémoire Flash de 256 Ko. Il est aussi doté de plusieurs périphériques qui
servent à réaliser des fonctionnalités complémentaires à celle du CPU qui est le traitement numérique des
données, dont on cite à titre d’exemples:
1) Une PLL (Phase Looked Loop) : boucle à verrouillage de phase pour fixer et adapter les fréquences de
fonctionnement du CPU (une fréquence maximale de 24 MHz) et celles des périphériques.
2) SCI (Serial Communications Interface) :Interface de communication série, qui sert à effectuer une
communication asynchrone entre deux systèmes selon un protocole série.
3) SPI (Serial Peripheral Interface): Interface de communication série synchrone, qui sert à effectuer une
communication synchrone entre deux systèmes.
4) TIM (Timer Module) : Module de temporisation, qui a pour rôle de contrôler 8 horloges
programmables pour réaliser des compteurs d’événements externes (lecture des caractéristiques des
signaux), la comparaison de sorties, le comptage d’impulsions via un accumulateur de 16 bits...
5) PWM (Pulse Width Modulator) :Module de la modulation à largeur d’impulsion, qui sert à contrôler la
durée d’une impulsion sur 16 canaux de sorties, et permettre ainsi de générer jusqu’à 16 signal
numériques précis de période et forme contrôlables par programme.
6) ADC (Analog to Digital Converter) :Convertisseur Analogique-Numérique, qui a pour rôle de convertir
en numérique des signaux analogiques externes en vue de les traiter par le processeur.
7) I/O (Input/Output) : ports d’entrée/sortie numérique, qui servent àgérer des données numériques en
entrée comme en sortie.
Ces divers composantes du microcontrôleur sont intégrées dans un seul boitier de 112 broches qui
forment le microcontrôleur Motorola MC9S12DG256 qui l’élément de base de la carte utilisée dans ces
travaux pratiques « Dragon12-Light board ».

Ecole militaire polytechnique 2024-2025 TP Processeurs et µ-Contrôleur HCS12
2/13
La carte à microcontrôleur « Dragon12-Light board »est une carte de développement qui assure
une utilisation facile et immédiate du microcontrôleur. Le téléchargement et le débogage du code sur cette
carte est assuré via une liaison USB (adaptation d’une communication série via le circuit intégré
FT232RL(Voir la figure sur la page suivante)) dont l’installation d’un pilote (Driver) afin de le reconnaitre par
le PC (machine hôte sur lequel l’IDE est installé). Le bus USB permetaussi l’alimentation de la carte pour
certaine applications, si elle n’est pas branchée sur un autre type d’alimentation.
Figure1 : Vue globale de la carte Dragon12-Light board

Ecole militaire polytechnique 2024-2025 TP Processeurs et µ-Contrôleur HCS12
3/13
III.1. Caractéristiques matérielles de la carte Dragon12-Light
La carte Dragon12-Light(Figure 1) englobeinterfaces et composants servant à réaliser plusieurs les
fonctionnalités pour l’interfaçage avec son environnement externe :
1. Interface USB intégrée pour SCI0 et SCI1 ;
2. LED de couleur RVB ;
3. Une horloge temps réel DS1307 RTC à sortie I2C ;
4. Un Port d'extension I2C pour l'interfaçage des systèmes I2C externes ;
5. Un Port d'extension CAN ;
6. Un Port d'extension SPI pour l'interfaçage des systèmes SPI externes ;
7. Double CNA (DAC) de 10 bits pour tester l'interface SPI et générer des signaux analogiques ;
8. Quatre Afficheur 7 segments à LED ;
9. Une série de Huit LED liées au Port B ;
10. Un Interrupteur DIP à huit positions ;
11. Quatre boutons poussoirs ;
12. Un « haut-parleur » (Speaker) qui peut être piloté par une « minuterie » (Timer) ou par un signal
DAC ou PWM pour les applications d'alarme ou de musique ;
13. Double pont en H pour la commande de deux moteurs à courant continu ou un moteur pas à pas ;
14. Indicateurs LED d'alimentation 5V ;
15. Connecteur BDM-in à connecter à un BDM pour le débogage ;
16. Un commutateur «Abort SW » pour arrêter (abandonner l’exécution) le programme quand il est
bloqué dans une boucle infinie (blocage) ;
17. Sélecteur de mode permettant de sélectionner 4 modes de fonctionnement : EVB, Jump-to-
EEPROM, BDM POD et Bootloader.
18. La carte contient aussi un potentiomètre pour les démos ainsi qu’un espace réservé pour le
prototypage rapide d’interfaces électroniques pour l’environnement extérieur.
La description de cette carte est plus détaillée dans le fichier
Dragon12_light_hcs12_manual_A.pdfque vous pouvez télécharger sur internet. Ce manuel est
fourni par vos enseignants lors de la séance de TP. N’hésitez pas à le consulter en cas de nécessité.
III.2. Instructions générales sur l’utilisation de la carte Dragon12-Light
La fréquence de l’oscillateur (cristal) « Source d’Horloge » est de 8 MHz et entraîne généralement
une vitesse de bus par défaut de 4 MHz (divisé par deux). Toutefois, sur cette carte, la PLL interne du
MC9S12DG256 peut être configurée (par programme) pour atteindre une fréquence de fonctionnement
maximale de 24 MHz.
NB1 : Consultez toujours le manuel de a carte Dragon12_light_hcs12_manual_A.pdfpour choisir le mode de
fonctionnement adéquat de votre carte (4 modes de fonctionnement possibles (voir point17. Plus haut).
NB2 : faites attention aux zones mémoires utilisées (RAM, FLASH et EEPROM). Consulter toujours le plan
mémoire (MC9S12DG256 Memory map) sur votre manuel de la carte ou utiliser le
DatasheetMC9S12DG256_datasheetdu microcontrôleur à chaque fois qu’il est nécessaire.
NB3 : évitez de modifier les positions des Jumpers sur votre carte s’il n’est pas nécessaire, ça peut modifier le
fonctionnement de l’un des interfaces de la carte ou causer carrément un disfonctionnement de la carte.
NB4 : N’hésitez pas à consulter vos enseignants en cas de problème de connexion, disfonctionnement où à chaque
fois qu’il est nécessaire !

Ecole militaire polytechnique 2024-2025 TP Processeurs et µ-Contrôleur HCS12
4/13
III.3. Connexion de la carte Dragon12-Light à un micro-ordinateur :
Programme de test en usine
Cette carte est gérée via le moniteur série Freescale(communication série) pour l’environnement
de développement CodeWarrior. Une pré-installation est déjà effectuée avec un programme de test d’usine
(par le constructeur http://www.evbplus.com) qui permet de voir les 8 LED liés au port B s'allument de
droite à gauche. Le haut-parleur émettra ensuite une tonalité pour indiquer que le moniteur série fonctionne.
Télé-versement de code
L’état du commutateur (switch) gauche du connecteur DIP à 2 positions (SW7) est testé par le
moniteur si elle est en mode RUN (position par défaut) ou LOAD lors de la mise sous tension ou de la
réinitialisation.Si le commutateur de gauche est placé en mode "LOAD" (position "basse"), le moniteur
attendra une commande d'un PC. S’il est plutôt placé en mode "RUN" (position "vers le haut"), dès la mise
sous tension, c’est le programme de test d’usine qui s’exécutera.
Le télé-versement du code (une application développée par l’utilisateur) sous l’IDE CodeWarrior est
possible si seulement le commutateur est placé à l’état Load. Par conséquent, pour assurer l'interfaçage avec
le CodeWarrior, vous devez placer ce commutateur en positionbasse «Load».Par conséquent, c’est la
première des choses à faire si votre carte ne communique pas avec CodeWarrior.
Installation du pilote de communication pour l’émulateur
FT232RL
Comme nous l’avons déjà expliqué dans l’introduction (page 02/12), le téléchargement et le
débogage du code sur cette carte est assuré via une liaison USB à l’aide du circuit intégré
FT232RL(Emulateur) dont l’installation d’un pilote (Driver) afin de le reconnaitre par le machine hôte est
nécessaire. En effet, la première des choses à faire est d’installer le pilote du circuit intégréFT232RL
assurant la conversion Série-USB. Ce pilote peut être téléchargé à partir du site du
constructeurhttps://www.ftdichip.com/.Il est aussi fourni par vos enseignants lors la première séance de
TP. Installez-le sur votre PC tout en sélectionnant la version adéquate à votre système d’exploitation.
Pour vérifier si le pilote FT232RL est correctement installé et connaitre l’affectation du port COM à
ce nouveau périphérique(FT232RL) sur votre PC, lancez le gestionnaire de périphériques (Device Manager)
et double-cliquez sur Ports (COM & LPT1). Le numéro de ce port, comme le montre la figure 2, USB Serial
Com (COMn) vous sera demandé lors du télé-versement du code à partir de l’IDE CodeWarrior.
Figure 2: Localisation du port COM attribué au FT232RL sur votre ordinateur.
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%