Exercice : Vérin électromécanique - Analyse et dimensionnement
Telechargé par
ezzeddinechiheb

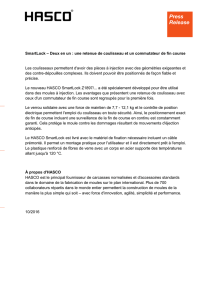
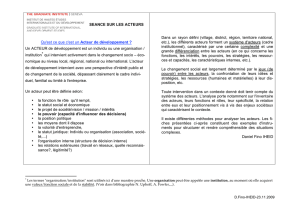
Description :
La rotation de l’arbre moteur entraîne la rotation d’une part l’écrou (30) et d’autre part la vis
(32). Ces deux transmissions de mouvements de rotation sont assurées par le train
d’engrenages formé par les couples de roue dentées (20,26) et (4,24).
Le système vis écrou (30-32) sert à transformer l’énergie de rotation du moteur en énergie
de translation de la tige (33).
Nomenclature :
15
2
Coussinet
30
1
Ecrou
45
1
.......................
14
1
Plaque
29
1
Fond
44
1
bouchon
13
1
Coulisseau
28
1
Roue dentée
43
1
Joint torique
12
2
Guide
27
1
coussinet
42
1
Joint à lèvres
11
4
Vis à tète cylindrique
26
1
Roue dentée
41
1
Joint torique
10
4
Vis à tète cylindrique
25
1
Ecrou
40
1
Couvercle
9
1
Ecrou H
24
1
........................
39
1
Bille
8
1
Equerre
23
1
Arbre cannelé
38
1
Coussinet
7
1
Ecrou
22
2
plaque
37
1
Rondelle frein
6
2
coussinet
21
1
Ecrou
36
4
Ecrou H
5
2
Clavette
20
1
Roue dentée
35
1
Equerre
4
1
Pignon arbré
19
1
Coussinet
34
1
Vis sans tète
3
1
Joint à lèvres
18
1
Joint torique
33
1
Tige
2
1
Carter
17
4
Ecrou
32
1
Vis
1
1
Moteur électrique
16
1
Joint torique
31
1
Cylindre
Rep
Nb
Désignation
Rep
Nb
Désignation
Rep
Nb
Désignation
Sujet 1
Page : 1
VERIN ELECTRO-MECANIQUE
Mohieddine Jeridi

Echelle 2 :3
Sujet
1
Page : 2
45
Mohieddine Jeridi

Sujet
1
Page : 3
1- Analyse fonctionnelle :
En se référant au dessin d’ensemble, Compléter le diagramme F.A.S.T partiel ci-dessous relatif à la
fonction technique FT1 .
2- Analyse des solutions constructives:
a) Donner les noms et les fonctions des pièces: ( 24 ) et (45)
(24):........................................................................................................................................................
(45):........................................................................................................................................................
FT1:Transformer
le mouvement de
rotation de l’arbre
moteur (1)
en mouvement de
translation de la
tige (33)
FT11:Transmettre le
mouvement de rotation de
l’arbre moteur (1) à l’arbre
(23)
……………………………
………………….................
...…………………………
FT12:Guider l’arbre cannelé
(23) en rotation
FT18:………………………
……………………………….
FT17:Guider la roue dentée
(20) en translation
FT16:Transformer le
mouvement de rotation de
la vis (32) en mouvement
de translation de l’écrou
(30)
FT15:Lier l’arbre moteur (1)
à l’arbre cannelé (23)
FT13:Transmettre le
mouvement de rotation de
l’arbre moteur (1) à la vis
(32)
FT14;………………………
…………………………….....
FT19:Fixer la plaque (22)
au coulisseau (13)
FT110:Guider le
coulisseau(13)
……………………………
………………………..........
............…………………….
……………………………
…………………………......
.............…………………
……………………………
…………………………......
Coussinets (6)
……………………………
……………………………..
....................
……………………………
………………………..........
Engrenage (20 , 26 )
……………………………
………………………..........
……………………………
……………………………..
Mohieddine Jeridi

Sujet 1
Page : 4
b) Donner le nom et la fonction de la pièce ( 34 )
…………………………………………………………...................................................................................
c) Fonction des trous T1, T2 réalisés sur le coulisseau (13).
..................................................................................................................................................................
d) Fonction des trous réalisés sur l'écrou (25).
……………………………………………………………...............................................................................
e) Pour quelle raison a-t-on prévu un méplat sur la tige (33) ?
..................................................................................................................................................................
f) L'écrou (30) est en Cu Sn 9 P. Désigner et justifier le choix de ce matériau :
..................................................................................................................................................................
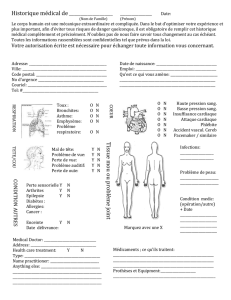
3 - Analyse du fonctionnement :
a) Sur le dessin d’ensemble et avec des couleurs différents colorier les classes d’équivalences
b) Compléter le tableau des classes d’équivalence , le graphe des liaisons et le schéma cinématique.
Classes d’équivalence cinématique Graphe des liaisons.
Classes
Composants
A
1 ;……………………………………...........
B
23 ;…………………………………………..
C
32 ;…………………………………………….
D
20 ;…………………………………………….
E
26 ;……………………………………………..
F
33 ;…………………………………...............
schéma cinématique :
A
C
E
F
D
B
Moteur
Mohieddine Jeridi

Sujet 1
Page : 5
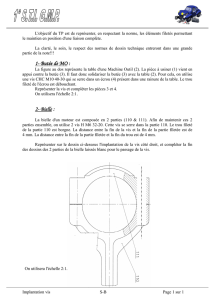
4 - Etude du guidage de la vis (32)
a) La condition A est-elle mini ou maxi ? Justifier :
…………………………………………………………………………………………………………..
…………………………………………………………………………………………………………..
b) Tracer les chaînes de cotes minimales installant les conditions A et B.
c) donner les équations de A et B :
…………………………………………………………………………………………………………..
…………………………………………………………………………………………………………..
…………………………………………………………………………………………………………..
…………………………………………………………………………………………………………..
…………………………………………………………………………………………………………..
…………………………………………………………………………………………………………..
d) Mettre les ajustements nécessaires du montage des coussinets (6) et (6’)
e) En se référant au dessin d’ensemble, compléter le tableau ci-dessous.
Pièces
ajustement
Type : Jeu ou serrage
Ecrou(30) /coussinet(27)
.....................................
.....................................
coulisseau(13)/ coussinet19
..................................... .....................................
Joint(3) / pignon(4)
..................................... .....................................
Joint(42)/Bouchon (44)
..................................... .....................................
Tige(33) /Bouchon (44)
..................................... .....................................
coulisseau 13/Cylindre31
..................................... .....................................
Mohieddine Jeridi
 6
6
1
/
6
100%