2017-2018
Unité d'Enseignement
Résistance des Matériaux
Chargé de cours : Schiepers Nicolas
Pour l'IEPSCF-Uccle

2

3
CHAPITRE 1 NOTIONS DE STATIQUE
1.1 Définition
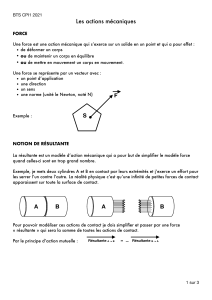
Une force est l'action d'un corps sur un autre. Comme tous les vecteurs en général, une force est
caractérisée par:
son origine
son intensité
sa direction / sa droite d'action
son sens
L'orientation de la force se mesure par un angle, en degrés. À moins d'avis contraire, on donne
l'angle (mesuré en tournant dans le sens antihoraire) entre l'horizontale et la force.
L'intensité de la force se mesure en Newton. Conformément au Système International, en abrégé : N
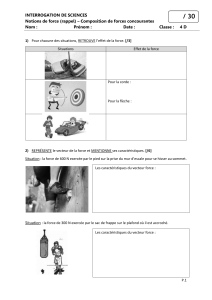
Par convention, la représentation graphique de cette force se fait par une flèche dont l'origine se
situe sur le point d'application de cette force. Sa longueur est proportionnelle à la force, elle est à
une certaine échelle.
NB : La Gravité :
Le poids est une mesure de la force entre deux objets due à la gravité, le poids s'exprime en
newtons.
Par abus de langage, le poids est pourtant souvent exprimé en kilogrammes (unité de masse).
Sur Terre, une masse de 1 kg génère une force (poids) de 9,80665 N (valeur qui varie
légèrement en fonction de la pesanteur à l'endroit où l'on se trouve). La pesanteur « normale »
(définie en 1901 lors de la 3e Conférence générale des poids et mesures) a été fixée à 9,80665
m/s.
Pour le reste du cours, il sera toujours estimé que 1kg = 10N.
1kN
45°

4
1.2 Addition vectorielle: méthodes graphiques
La somme de deux ou plusieurs forces s'appelle la résultante. Il y a deux manières de trouver
graphiquement la résultante de deux forces; la méthode du parallélogramme et la méthode du
triangle.
Dans une méthode graphique, on doit faire avec soin un dessin à l'échelle. On mesure les longueurs
des flèches à l'aide d'une règle et leurs angles à l'aide d'un rapporteur. On ne fait pas de calculs
(autres que les conversions d'échelle).
Dans la description des exemples suivants on détermine systématiquement quelle est l'échelle du
dessin. La représentation graphique d'une force impose de déterminer une échelle qui convertira
l'unité de mesure en une certaine quantité de Newton.
1.2.1 Méthode graphique du parallélogramme

5
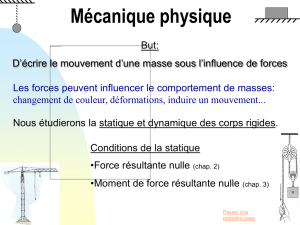
1.2.2 Méthode graphique du Triangle
On ne peut additionner que deux forces à la fois par la méthode du parallélogramme. Par contre, si
on utilise la méthode, du triangle, on peut continuer à mettre d'autres vecteurs bout à bout. La
résultante est toujours représentée par la flèche dont l'origine est sur l'origine de la première force
et la flèche sur celle de la dernière force. La figure finale n'est pas un triangle mais bien un polygone
et on parle alors de «méthode du polygone» au lieu de «méthode du triangle».
A
!
B
!
C
!
D
!
E
!
R
!
A
!
B
!
C
!
D
!
E
!
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%