2022/2023
Pr. OULCAID
Cours:
Automatique et commande des
systèmes
Université Sultan Moulay Slimane
Ecole Nationale des Sciences Appliquées
Béni-Mellal
1

Partie III
Automatique des systèmes discrets
Université Sultan Moulay Slimane
Ecole Nationale des Sciences Appliquées
Béni-Mellal
2

Plan
1. Définition de l'automatisme
3

1. Définition de l'automatisme
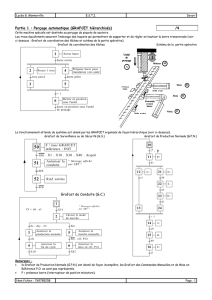
Cette figure montre la
structure typique d'un système
automatisé.
Actionneurs Processus Capteurs
Système de
contrôle
Information Consignations
Opérateur
Un système automatisé (machine ou processus) est défini comme un système
capable de réagir automatiquement (sans intervention de l'opérateur) aux
changements survenant dans le système en effectuant les actions
appropriées pour remplir la fonction (cahier des charges) pour laquelle il
a été conçu.
Système automatisé
4

Il s'agit d'un système en boucle fermée, dans
lequel les informations sur l’évolution du
processus renvoyées par les capteurs sont
traitées et donnent lieu aux actions
nécessaires, qui sont physiquement mises en
œuvre sur le processus au moyen d'actionneurs.
Ce système de contrôle communique éventuellement avec
l'opérateur, recevant de sa part des instructions de
fonctionnement, telles que démarrage, arrêt, modification
des caractéristiques de production, etc... et communiquant
des informations sur l'état du processus (pour la
supervision d’un fonctionnement correct).
1. Définition de l'automatisme
Système automatisé
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
1
/
61
100%