MES PAS EN MECANIQUE APPLIQUEE
Classe de Seconde Industrielle Page 1

MES PAS EN MECANIQUE APPLIQUEE
Classe de Seconde Industrielle Page 2
AVANT-PROPOS
Dans le souci d’apporter notre modeste contribution à l’éducation de jeunes
apprenants aspirant à maitriser ou à faire leur pas dans le domaine de la mécanique
appliquée, en particularité celui de la statique, et au vu de la rareté de document pédagogique
en conformité avec le programme d’étude en vigueur dans notre pays pouvant servir support
à leur apprentissage, nous avons jugé nécessaire de mettre à leur disposition, Mes Pas En
Mécanique Appliquée, qui est un ouvrage support de cours permettant aussi bien aux élèves
de se familiariser avec le domaine, qu’aux enseignants d’avoir une plus grande flexibilité de
transmission de connaissance. C’est notre plus grande espérance.
Bien que conçu à priori pour les classes de seconde F2 et F3 en conformité avec leur
programme officiel en vigueur, les élèves des classes de seconde industrielle toute spécialité,
de formation professionnelle, des classes industrielles immédiatement supérieure à la classe
de seconde et tout autre personne guidé par l’esprit de curiosité ou désirant se recycle,
trouveront en cet ouvrage, un document adapté à leur apprentissage où des notions et
problèmes fréquemment rencontrés en mécanique appliquée sont traités de façon abordable
et progressive dans le style d’une approche par compétence (APC) prescrit par les autorités
en charge de l’éducation national notamment celles de l’enseignement secondaire.
Cet ouvrage conçu comme un guide, rassemble l’essentiel des connaissances nécessaires
aux applications usuelles de la mécanique en conformité avec le programme officiel et
propose de nombreux exemples d’application et exercices, nous le souhaitons, qui favorisent
une compréhension et assimilation rapide des connaissances par les apprenants.
Nous nous soumettons volontiers à toutes vos suggestions, remarques critiques ou
questions pour aider à l’amélioration de cet ouvrage qui ne serait être imperfectible, cela pour
le bonheur de nos apprenants qui doivent être l’intérêt supérieur visé par tous. Nos contacts
[email protected] ou 6 50 75 42 22
L’auteur

MES PAS EN MECANIQUE APPLIQUEE
Classe de Seconde Industrielle Page 3
SOMMAIRE
AVANT-PROPOS……………………………2
SEQUENCE I : NOTION DE
TRIGONOMETRIE
I.1- NOTION D’ANGLE………………….….….5
I.2- VOCABULAIRE ET EGALITE DEUX
ANGLES………………………………………...5
I.3- TRIANGLE RECTANGLE ET
THEOREME DE PYTHAGORE……………...6
I.4- CERCLE TRIGONOMETRIQUE …….…..8
I.5- EXERCICES D’APPLICATION…………..9
SEQUENCE II : NOTION DE VECTEUR
II.1- DEFINITION ET CARACTERISTIQUES
D’UN VECTEUR…………………………......19
II.2- COORDONNEES D’UN VECTEUR…..20
II.3- OPERATION SUR LES VECTEURS…22
II.4- EXERCICES D’APPLICATION………..28
SEQUENCE III : NOTION DE VECTEUR
FORCE ET RESULTANTE DE FORCES
III.1- NOTION DE VECTEUR FORCE……..39
III.2- NOTION DE RESULTANTE DE
FORCES………………………………………40
III.3- PROJECTION D’UNE FORCE DANS
UN PLAN………………………………………42
III.4- EXERCICES D’APPLICATION……….43
SEQUENCE IV : MOMENT D’UNE
FORCE - COUPLE
IV.1- MOMENT D’UNE FORCE PAR
RAPPORT A UN POINT………………...…..51
IV.2- VECTEUR MOMENT : METHODE
DU PRODUITVECTORIEL………..………...54
IV.3- RELATION FONDAMENTALE
ENTRE LES MOMENTS….…………………55
IV.4- MOMENT D’UNE FORCE PAR
RAPPORT A UN AXE FIXE…………………55
IV.5- MOMENT RESULTANT DE
PLUSIEURS FORCES……………………....56
IV.6- NOTION DE COUPLE…………………56
IV.7- EXERCICES D’APPLICATION……….57
SEQUENCE V : CORPS SOLIDE –
SYSTEME MATERIEL
V.1- DEFINITION DE QUELQUES
TERMES.......................................................67
V.2- CENTRE DE GRAVITE – CENTRE DE
MASSE D’UN SYSTEME MATERIEL..…….67
V.3- NOTION D’ISOLEMENT D’UN
SYSTEME MATERIEL……………………….69
V.4- PRINCIPE DES ACTIONS MUTUELLES
OU RECIPROQUES…………………………71
V.5- EXERCICES D’APPLICATION………..72

MES PAS EN MECANIQUE APPLIQUEE
Classe de Seconde Industrielle Page 4
SEQUENCE VI : MODELISATION DES
ACTIONS MECANIQUES
VI.1- CLASSIFICATION DES ACTIONS
ECANIQUES………………………….……....83
VI.2- MODELISATION DES ACTIONS
MECANIQUES DE LIAISONS
USUELLES……………………………….......87
VI.3- EXERCICES D’APPLICATION……….89
SEQUENCE VII : NOTION DE TORSEUR
VII.1- DEFINITION ET NOTATION…………95
VII.2- OPERATION SUR LES
TORSEURS……………………………...……95
VII.3- RELATION DE TRANSFERT EN UN
POINT….…………………………………..…..97
VII.4- TORSEUR DE QUELQUES
LIAISONS MECANIQUES USUELLES…….98
VII.5- EXEMPLES…………………………….99
VII.5- EXERCICES D’APPLICATION.…….100
SEQUENCE VIII : PRINCIPE
FONDAMENTAL DE LA STATIQUE
VIII.1- ENONCE DU PRINCIPE
FONDAMENTAL DE LA STATIQUE……...101
VIII.2- EQUATIONS DE LA STATIQUE..…101
VIII.3- SYSTEME HYPERSTATIQUE –
SYSTEME ISOSTATIQUE…………………102
VIII.4- METHODE DE RESOLUTION
D’UN PROBLEME DE STATIQUE….….....103
VIII.5- RESOLUTION ANALYTIQUE D’UN
PROBLEME DE STATIQUE…………….…104
VIII.6- EXERCICES D’APPLICATION….…108
SEQUENCE IX : STATIQUE
GRAPHIQUE
IX.1- SYSTEME MATERIEL SOUMIS A
L’ACTION DE DEUX FORCES……………130
IX.2- SOLIDE SOUMIS A L’ACTION DE
TROIS FORCES PARALLELES….……….131
IX.3- SOLIDE SOUMIS A L’ACTION DE
TROIS FORCES CONCOURANTES…..…134
IX.4- SOLIDE SOUMIS A L’ACTION DE
QUATRE FORCES NON PARALLELES…140
IX.5- EXERCICES D’APPLICATION…...…144
SEQUENCE X : NOTION D’ADHERENCE
- FROTTEMENT
X.1- DEFINITION ET CARACTERISTIQUES
D’UN FROTTEMENT….……………………156
X.2- LOIS D’ADHERENCE OU LOIS DE
FROTTEMENT OU LOIS DE
COULOMB.................................................157
X.3- PHENOMENE D’ARC-BOUTEMENT.159
VII.5- EXEMPLES………………...…………160
X.4- EXERCICES D’APPLICATION...........162
BIBLIOGRAPHIE.......................................179

MES PAS EN MECANIQUE APPLIQUEE
Classe de Seconde Industrielle Page 5
ELEMENTS DE COMPETENCES :
Définir la notion d’angle
Maitriser le vocabulaire sur les angles
Appliquer les propriétés de trigonométrie relatives aux angles
Exploiter le cercle trigonométrique
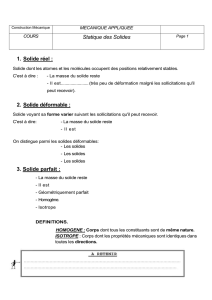
I.1- NOTION D`ANGLE
I.1.1- Définition
Un angle est formé par 2 droites ayant la même origine
(figure 1.1). Le sommet d’un angle est toujours au milieu. On
peut écrire le même angle de différentes manières :
𝜷=𝑨𝑶𝑩
=𝑨𝑶𝒄
=𝑩𝑶𝒅
=𝒄𝑶𝒅
. Lorsqu’il n’y a pas ambiguïté
par 𝑶
tout simplement.
I.1.2- MESURE D’UN ANGLE
L’instrument de mesure d’un angle est le rapport. Les unités de mesure d’un angle sont
le degré, le Radian (rad) et le Grade (grad). On utilisera fréquemment le degré ou le radian.
𝟏 𝒕𝒐𝒖𝒓 = 𝟑𝟔𝟎° = 𝟐𝝅 𝒓𝒂𝒅=𝟒𝟎𝟎𝒈𝒓𝒂𝒅
I.2- VOCABULAIRE ET EGALITE DES ANGLES
I.2.1- Vocabulaire sur les angles
Considérons la figure 1.2 ci-contre tel que les
droites (D1) et (D2) sont parallèles, la droite (D3)
sécante aux deux autres.
On dira que deux angles sont opposés par le
sommet s’ils possèdent le même sommet et
leurs côtés opposés par rapport à ce même
sommet.
Exemple :
SEQ
U
ENC
E I
: NOTION DE TRIGONOMETRIE
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
1
/
148
100%