1
RÉPUBLIQUE ALGÉRIENNE DÉMOCRATIQUE ET POPULAIRE
MINISTÈRE DE L'ENSEIGNEMENT SUPÉRIEUR ET DE LA RECHERCHE
UNIVERSITÉ MED SEDDIK BENYAHIA - JIJEL
FACULTÉ DES SCIENCES ET DE LA TECHNOLOGIE
DEPARTEMENT D’ENSEIGNEMENT FONDAMENTAL ET DE LA TCHNOLOGIE
Cours de Physique 02 pour les étudiant de 1ère année
Sciences et Technologie
Electricité et Electromagnétisme
Par : N. MAHAMDIOUA
Maître de conférences (MCB) à l’université de Jijel

2
I. RAPPELS MATHÉMATIQUES
(1 Semaine)
I-1- Éléments : de longueur, de surface, de
volume dans des systèmes de coordonnées
cartésiennes, cylindriques, sphériques.
I-2- Angle solide,
I-3- Les opérateurs (le gradient, le
rotationnel, Nabla, le Laplacien et la
divergence).
I-4- Intégrales multiples.
I-5- Dérivées ;

Physique 2: Electricté et électromagnétisme N. MAHAMDIOUA
3
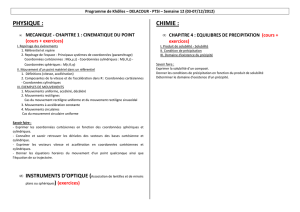
I-1- Éléments : de longueur, de surface, de volume
dans des systèmes de coordonnées cartésiennes,
cylindriques, sphériques.
a. Le vecteur de position
dans le :
i. Système de coordonnées cartésienne
ii. Système de coordonnées Polaires

Physique 2: Electricté et électromagnétisme N. MAHAMDIOUA
4
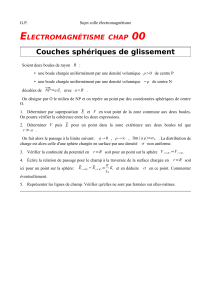
iii. Système de coordonnées cylindriques
iv. Système de coordonnées sphériques
b. Éléments : de longueur
i. Système de coordonnées cartésienne ;
ii. Système de coordonnées Polaires ;
iii. Système de coordonnées cylindriques ;
iv. Système de coordonnées sphérique ;

Physique 2: Electricté et électromagnétisme N. MAHAMDIOUA
5
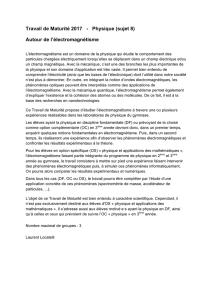
c. Élément de surface et volume dans le :
i. Système de coordonnées cartésienne
;
ii. Système de coordonnées Polaires
iii. Système de coordonnées cylindriques
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%