Oral type CCP
Page 1/6
IMPORTANT Aucun rapport écrit n’est demandé au candidat. Il sera évalué
uniquement sur la base de ses échanges avec l’examinateur. Si cela est précisé dans le
sujet, la synthèse de fin d’épreuve peut se faire sous la forme d’un poster à réaliser et
à commenter en présence de l’examinateur. En fin d’épreuve, l’examinateur
ramassera tous les documents du candidat pour destruction.
TP MOBYCREA :
ETUDE D’UN BERCEUR POUR BEBE
OBJECTIFS DU TP :
Le berceur de bébé doit permettre de bercer l’enfant en toute sécurité.
Nous allons nous intéresser à la transmission des mouvements, aux caractéristiques cinématiques, puis
énergétiques.
Nous allons commander le déplacement horizontal par un asservissement que nous allons concevoir, modéliser
puis essayer sur le système.
I MISE EN SITUATION DU SYSTEME temps estimé : 10 minutes
1. Présentation du système
Fonctionnement :
Le fonctionnement de l’appareil est donné par le diagramme de séquence page suivante:
Faites fonctionner le système en vous aidant de diagramme de séquence.

Oral type CCP
Page 2/6
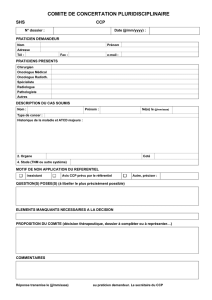
2. Etude du mouvement horizontal
Le mouvement horizontal est donné par le mécanisme ci-dessous :
le moteur est alimenté par
un commutateur (transistor),
qui reçoit les consignes de la
chaîne d’information. Le
moteur entraine le siège en
translation par l’intermédiaire
du réducteur de vitesse et du
système bielle manivelle

Oral type CCP
Page 3/6
Après une phase d’analyse du comportement du système réel et virtuel, nous avons constaté la nécessité
d’avoir une maitrise des vitesses de rotation, d’une part pour avoir une rotation à vitesse constante
indépendante de la charge, d’autre part pour garantir la synchronisation des mouvements et le suivi des
trajectoires. Notre étude portera sur la régulation de vitesse sur l’axe horizontal.
Attention Vous devez présenter le système et donner la problématique du TP 3 minutes
Analyse de la chaîne de transmission
a) La chaîne d’énergie
b) Le moteur à courant continu. temps estimé : 45 minutes
Le modèle équivalent du moteur est donné ci-dessous avec ses équations de fonctionnement.
Schéma électromécanique d'un moteur à courant continu, à flux constant :
R L
i(t)
fJ
Cm
u(t)
R, L résistance et inductance du circuit induit ;
Ke, Kc constante de f.c.e.m. et de couple ;
u, i tension de commande et courant moteur ;
f coefficient de frottements visqueux ;
J inertie propre du moteur + inertie de la mécanique entraînée.
En appliquant la loi d'Ohm à l'induit on trouve
di t
u t R i t L e t
dt
Les équations électromécaniques sont
mc
C t K i t
et
e
e t K t
.
Le principe fondamental de la dynamique appliquée à la partie tournante donne :
mdt
C t f t J dt
Donner les équations du moteur dans le domaine de Laplace (conditions initiales nulles)
U (p) =
Cm (p) =
E (p) =
Cm (p) =

Oral type CCP
Page 4/6
Compléter le schéma bloc :
Pour calculer pdans le cas d’un système perturbé, on applique le principe de superposition. (le système est linéaire).
(p) = H1(p) U(p) + H2(p) Cr(p)
Donner les valeurs de H1(p) et de H2(p)
Ce moteur est monté dans un asservissement de vitesse avec une boucle de retour.
Proposer un schéma cinématique de la transmission du mouvement horizontal.
(Comparateur, ampli, moteur, réducteur, capteur de vitesse….)
Quel capteur choisissez-vous ?
Donner le schéma bloc de cet asservissement
Quel est l’ordre de cet asservissement ?
On s’intéresse maintenant à l’action liée à U(p) (Cr(p) = 0)
Exprimer la fonction de transfert en boucle ouverte FTBO(p)
Quel est l’ordre de cette fonction de transfert ?
Le système en boucle fermée est-il stable ?
Tracer le diagramme de Bode de FTBO(p)
Déterminer graphiquement les marges de gain et marge de phase.
c) Le réducteur. temps estimé : 5 minutes
Faire un schéma cinématique du réducteur de vitesse
Ce réducteur est constitué d’un système poulie courroie
D = 30 mm d = 20 mm
La vis du système roue vis sans fin a 1 filet.
La petite roue a 25 dents
La grande roue a 100 dents
Sachant que le moteur tourne à 4000 tr/min,
Calculer la vitesse de rotation de la grande roue.
U(p)
p
+
-
I(p)
Cm(p)
E(p)
Cr(p)
+
-
Perturbation

Oral type CCP
Page 5/6
d) La transformation de mouvement bielle manivelle. temps estimé : 30 minutes
Démontrer la relation précédente,, vous prendrez la méthode votre choix.
Que pouvez-vous dire de la vitesse de translation du berceau si la vitesse de translation du moteur est
constante Ici R= 40 mm et L= 100 mm
Vous vous servez d’un tableur, de Python ou de votre calculatrice pour vous aider.
On a pris conscience que le déplacement est vaguement sinusoïdal, la vitesse et l’accélération seront aussi
vaguement sinusoïdaux si la vitesse d’entrée est constante
Ceci nous conduit à des efforts liés aux inerties qui seront de modélisation sinusoïdale.
Dans notre schéma bloc, on prendra Cr = c0 sin( roue * t+)
Donner la forme de la réponse indicielle de l’asservissement de vitesse (quand Cr = 0)
Donner la forme de cette réponse (quand Cr ≠ 0)
Correction
Notre système peut être corrigé par un PID de fonction de transfert
Uc(p) = Kp (p) +
i
1(p)
Tp
+
d
T p (p)
Quelles sont les conséquences des trois réglages Kc, Ti, Td sur le comportement du système ?
Quelle modifications sur le Bode apporte le réglage de Kp?
3. Confrontation modèle / réel. temps estimé : 15 minutes
 6
6
1
/
6
100%