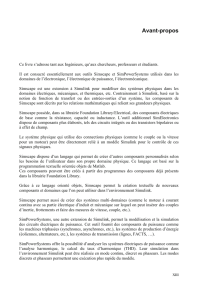
Un actionneur commun dans les systèmes de contrôle est le moteur à courant continu. Il
fournit directement le mouvement rotatif et, couplé avec des roues ou des tambours et
des câbles, peut fournir un mouvement de translation. Le circuit électrique de l'induit
et modèle du rotor sont représentés sur la figure suivante:
Pour cet exemple, nous supposerons que l'entrée du système est la source de tension
() appliquée à l'induit du moteur, alors que la sortie est la vitesse de rotation de l'arbre
. Le rotor et l'arbre sont supposés rigides. Nous supposons en outre un modèle de
frottement visqueux, c'est-à-dire que le couple de frottement est proportionnel à la vitesse
angulaire de l'arbre.
Les paramètres physiques de notre exemple sont:
(J) moment d'inertie du rotor 0,01 kg.m ^ 2
(b) constante de frottement visqueuse du moteur 0,1 N.m.s
(Ke) constante de force électromotrice 0.01 V / rad / sec
(Kt) constante de couple moteur 0,01 N.m / Amp
(R) résistance électrique 1 Ohm
(L) inductance électrique 0,5 H
En général, le couple généré par un moteur à courant continu est proportionnel au courant
d'induit et à la force du champ magnétique. Dans cet exemple, nous supposerons que le
champ magnétique est constant et, par conséquent, que le couple du moteur est

proportionnel au seul courant d'induit d'un facteur constant comme indiqué dans
l'équation ci-dessous. C'est ce qu'on appelle un moteur à contrôle par l’induit.
La fcém, , est proportionnelle à la vitesse angulaire de l'arbre par un facteur constant
Dans les unités SI, les constantes du couple moteur et de la force contre-électromotrice
sont égales, c'est-à-dire ; par conséquent, nous utiliserons pour représenter à
la fois la constante de couple du moteur et la constante de force contre-électromotrice.
Construire le modèle avec Simulink
Ce système sera modélisé en additionnant les couples agissant sur l'inertie du rotor et
en intégrant l'accélération pour donner la vitesse. En outre, les lois de Kirchoff seront
appliquées au circuit d'induit. Dans un premier temps, nous modéliserons les intégrales
de l'accélération de rotation et de la vitesse de variation du courant d'induit.
Pour créer le modèle de simulation, ouvrez Simulink et ouvrez une nouvelle fenêtre de
modèle. Ensuite, suivez les étapes ci-dessous.
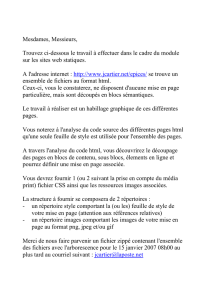
Insérez un bloc Integrator dans la bibliothèque Simulink / Continuous et tracez des
lignes vers et depuis ses terminaux d'entrée et de sortie.
Marquez la ligne d'entrée "d2 / dt2 (theta)" et la ligne de sortie "d / dt (theta)"
comme indiqué ci-dessous. Pour ajouter une telle étiquette, double-cliquez dans
l'espace vide juste en dessous de la ligne.
Insérez un autre bloc d'intégrateur au-dessus du précédent et dessinez des lignes
vers et depuis ses bornes d'entrée et de sortie.
Marquez la ligne d'entrée "d / dt (i)" et la ligne de sortie "i".

Ensuite, nous appliquerons la loi de Newton et la loi de Kirchoff au système moteur pour
générer les équations suivantes:
L'accélération angulaire est égale à 1 / J multipliée par la somme de deux termes (un
positif, un négatif). De même, la dérivée du courant est égale à 1 / L multipliée par la
somme de trois termes (un positif, deux négatif). En continuant à modéliser ces équations
dans Simulink, suivez les étapes ci-dessous.
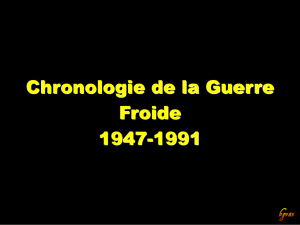
Insérez deux blocs Gain dans la bibliothèque Simulink / Math Operations, un
attaché à chacun des intégrateurs.
Modifiez le bloc Gain correspondant à l'accélération angulaire en double-cliquant
dessus et en changeant sa valeur à "1 / J".

Changez l'étiquette de ce bloc Gain à "Inertie" en cliquant sur le mot "Gain" sous
le bloc.
De même, éditez la valeur de l'autre Gain à "1 / L" et son étiquette à "Inductance".
Insérez deux blocs Add de la bibliothèque Simulink / Math Operations, un attaché
par une ligne à chacun des blocs Gain.
Modifier les signes du bloc Ajouter correspondant à la rotation à "+ -", car un terme
est positif et l'autre est négatif.
Modifier les signes de l'autre Ajouter un bloc à "- + -" pour représenter les signes
des termes dans l'équation électrique.
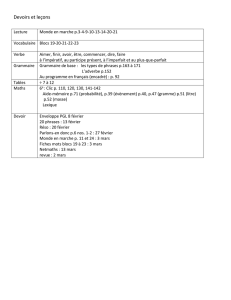
Maintenant, nous allons ajouter les couples qui sont représentés dans l'équation de
rotation. D'abord, nous allons ajouter dans le couple d'amortissement.
Insérez un bloc de gain sous le bloc "Inertia". Ensuite, cliquez avec le bouton droit
de la souris sur le bloc et sélectionnez Rotate & Flip> Flip Block dans le menu

résultant pour retourner le bloc de gauche à droite. Vous pouvez également
retourner un bloc sélectionné en maintenant la touche Ctrl-I enfoncée.
Réglez la valeur Gain sur "b" et renommez ce bloc en "Damping".
Appuyez sur une ligne (maintenez la touche Ctrl enfoncée lorsque vous dessinez
ou faites un clic droit sur la ligne) sur la sortie de l'intégrateur rotatif et connectez-
la à l'entrée du bloc "Amortissement".
Dessinez une ligne à partir de la sortie du bloc "Amortissement" vers l'entrée
négative du bloc Ajouter rotatif.
Ensuite, nous allons ajouter dans le couple de l'induit.
Insérez un bloc Gain attaché à l'entrée positive du bloc Rotation Add avec une
ligne.
Modifiez sa valeur à "K" pour représenter la constante du moteur et étiquetez-la
"Kt".
Continuez à dessiner la ligne menant de l'intégrateur actuel et connectez-la au
bloc "Kt".
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%