1/27
2 STE
TRANSMETTRE L’ENERGIE MECANIQUE AVEC MODIFICATION DE LA VITESSE
2 STE
COURROIES
POULIES
1. ROUES DE FRICTION
2. POULIES ET COURROIES
3. ENGRENAGES
4. VARIATEURS
5. BOITES DE VITESSE
SCIENCES DE L’INGENIEUR

2/27
2 STE
TRANSMETTRE L’ENERGIE MECANIQUE AVEC MODIFICATION DE LA VITESSE
2 STE
A- POULIES ET COURROIES :
I. Caractéristiques :
Avantages
Inconvénients par rapport aux chaines
Silencieuses
vitesses élevées
Grands entraxes
Durée de vie limitée
Couple transmissible faible pour les courroies plates
Tension initiale des courroies est indispensable pour garantir
l'adhérence et Réglage au cours du tempspourcompenser
l'allongement des courroies
Glissement de la courroie sur les poulies (À l'exception des courroies crantées)
II. PRINCIPAUX TYPES DE COURROIES :
Courroie plate :
Tansmission de vitesses très élevées(de 80 à 100 m/s ) ,
Très silencieuses
I. Fonction : Transmettre par adhérence, à l’aide d’un lien flexible « courroie », un
mouvement de rotation continu entre deux arbres éloignés.

3/27
2 STE
TRANSMETTRE L’ENERGIE MECANIQUE AVEC MODIFICATION DE LA VITESSE
2 STE
Courroie Crantée
Transmission silencieuse sans glissement (r2/1 précis) (Une des
deux poulies doit être flasquée afin que la courroie ne sorte pas des poulies)
Ex. utilisation : Entrainement de l’arbre à cames de moteurs
d’automobile
Corroies poly « V »
très utilisées en electroménager
Courroie Trapézoïdale
Puissance transmissible élevée (emploie de gorges multiples)
Forte adhérence entre courroie et poulie
Un crantage intérieur augmente la flexibilité et la capacité
à dissiper la chaleur aux hautes vitesses.
Courroie Poly V
très utilisées en electroménager

4/27
2 STE
TRANSMETTRE L’ENERGIE MECANIQUE AVEC MODIFICATION DE LA VITESSE
2 STE
Sans glissement le rapport des vitesses est :
𝐾 = 𝛚 menée
𝛚 menante
=……………………………..………………
Avec glissement :
𝐾𝑔=𝛚 menée
𝛚 menante
=……………………………………...………
Vitesse linéaire de la courroie :
V=………………………………………………………………….𝛚 = 𝟐𝛑𝚴
𝟔𝟎
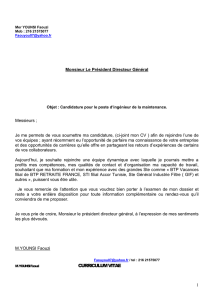
III. RAPPORT DE TRANSMISSION
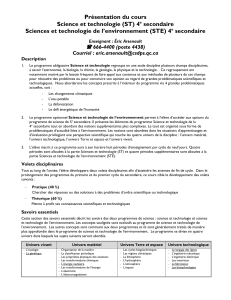
IV. Principe d'une transmission
Poulie
Motrice
Brin tendu
Brin mou
d1 = 300
1 = 238 rd/s
d2 = 750
M
R
Courroie Ronde
surtout utilisées dans les petits
mécanismes
Application : Exprimer et calculer le rapport de
transmission et la vitesse linéaire (V) de la courroie
…………………………………………………………………………………………
…………………………………………………………………………………………
…………………………………………………………………………………………
………………………………………………………………………………..…….

5/27
2 STE
TRANSMETTRE L’ENERGIE MECANIQUE AVEC MODIFICATION DE LA VITESSE
2 STE
B-PIGNONS ET CHAINES :
FONCTION :
PRINCIPALES CARACTERISTIQUES :
CHAINES A ROULEAUX : Ce sont les plus utilisées en transmission de puissance. Vitesse limite : 12 à 15 m/s.
RAPPORT DE TRASNSMISSION : II est analogue à celui des courroies crantées
………………………………………………………………….
………………………………………………………………….
………………………………………………………………….
………………………………………………………………….
AVANTAGES
INCONVENIENTS par rapport aux Poulies-Courroies
Rapport de transmission constant (pas de glissement)
Longue durée de vie
Supportent des conditions de travail plus rudes
Plus bruyantes
Lubrification nécessaire.
Basses vitesses de transmission
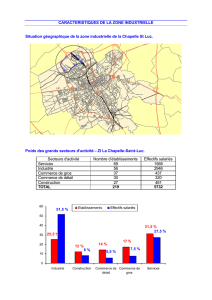
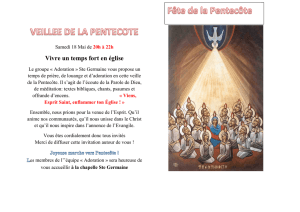
Brin tendu
Brin mou
Z2 = 20
Z1 = 52
M
R
Application : Exprimer et calculer le rapport de transmission de cette transmission composée de
deux pignons et d’une chaîne :
CHAINE
PIGNON
Le rapport de transmission :………………………………………………………………………………………………...
Vitesse linéaire de la chaîne :………………………………………………………………………………………………...
Transmettre par obstacle, à l’aide d’un lien articulé « chaîne », un
mouvement de rotation continu entre deux arbres éloignésparallèles.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%