Ecole Supérieure en Génie Electrique et Energétique
Construction des Machines Electriques II
1
1er partie : Machines asynchrones
1) Introduction :
Les moteurs à induction sont les moteurs à courant alternatif qui sont utilisés comme moteurs
principaux dans la plupart des industries. Ces moteurs sont largement utilisés dans les applications
industrielles, des petits ateliers aux grandes industries. Ces moteurs sont utilisés dans des
applications telles que les pompes centrifuges, les convoyeurs, les concasseurs de compresseurs,
les perceuses, etc.
2) Détails de construction :
Le moteur à induction AC comprend deux parties électromagnétiques :
• Partie fixe appelée stator
• Partie rotative appelée rotor
Le stator et le rotor sont chacun constitués de
• Un circuit électrique, généralement composé d'un bobinage isolé en cuivre ou en aluminium,
pour transporter le courant
• Un circuit magnétique, généralement en acier au silicium laminé, pour transporter le flux
magnétique
2-1) Le stator
Le stator est la partie externe fixe du moteur, qui se compose de :
• Le châssis cylindrique extérieur du moteur ou de la culasse, qui est en tôle d'acier soudée, en
fonte ou en alliage d'aluminium coulé.
• Le chemin magnétique, qui comprend un ensemble de tôles d'acier encoché appelées noyau de
stator enfoncées dans l'espace cylindrique à l'intérieur du cadre extérieur. Le chemin magnétique
est laminé pour réduire les courants de Foucault, réduisant les pertes et l'échauffement.
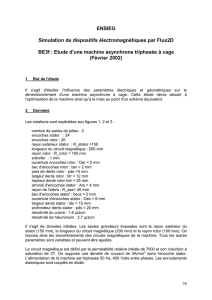
• Un ensemble de bobinages électriques isolés, placés à l'intérieur des encoches du stator feuilleté.
La section transversale de ces enroulements doit être suffisamment grande pour la puissance
nominale du moteur. Pour un moteur triphasé, 3 jeux d'enroulements sont nécessaires, un pour
chaque phase connectée en étoile ou en triangle. La figure 1 montre la vue en coupe d'un moteur
à induction.

Ecole Supérieure en Génie Electrique et Energétique
Construction des Machines Electriques II
2
Figure 1 : Tôles et l’enroulement de stator
2-2) Le rotor :
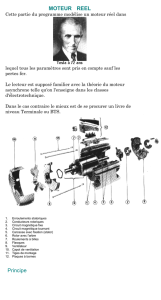
Le rotor est fait, comme le stator, de tôles empilées et habituellement du même matériau. Dans les
petits moteurs, les tôles sont découpées en une seule pièce et assemblées sur un arbre. Dans de
plus gros moteurs, chaque lamination est constituée de plusieurs sections et montée sur un moyeu
(Figure 2). Pour les rotors du type bobiné, les enroulements et leurs différents aspects sont
semblables à ceux du stator. Ils présentent toutefois la particularité d'être connectés à des bagues
sur les quelles frottent des balais qui rendent le circuit du rotor accessible de l'extérieur. Dans le
cas des rotors à cage d'écureuil, les encoches sont habituellement du type semi-ouvert, mais on
utilise parfois des encoches fermées. Les enroulements sont constitués de barres court-circuitées
par un anneau terminal placé à chaque extrémité du rotor. Les barres des gros moteurs sont
généralement en cuivre ou, à l'occasion, en laiton. Par contre, les barres des petits moteurs sont en
aluminium ; on utilise de plus en plus le coulage d'aluminium pour des moteurs de plusieurs
dizaines et même de quelques centaines de kilowatts. L'aluminium coulé permet de fabriquer les
anneaux terminaux en même temps que les barres qui épousent la forme de l'encoche, qui peut être
tout à fait quelconque.
Figure 2 : Rotor ; (gauche) roto à cage d'écureuil ; (droite) rotor bobiné.

Ecole Supérieure en Génie Electrique et Energétique
Construction des Machines Electriques II
3
3) Introduction à la conception :
L'objectif principal de la conception d'un moteur à induction est d'obtenir les dimensions physiques
complètes de toutes les pièces de la machine comme mentionné ci-dessous pour satisfaire les
spécifications du client. Les détails de conception suivants sont requis.
1. Les dimensions principales du stator.
2 Détails des bobinages du stator.
3. Détails de conception du rotor et de ses enroulements
4. Caractéristiques de performances.
Afin d'obtenir les détails de conception ci-dessus, le concepteur a besoin des spécifications du
client
Puissance de sortie nominale, tension nominale, nombre de phases, vitesse, fréquence, connexion
de l'enroulement du stator, type d'enroulement du rotor, conditions de travail, détails de l'extension
de l'arbre, etc.
En plus de ce qui précède, le concepteur doit disposer des détails concernant les équations de
conception sur la base desquelles la procédure de conception est lancée, des informations
concernant les différents choix de divers paramètres, des informations concernant la disponibilité
de différents matériaux et les valeurs limites de divers paramètres de performance tels que le fer
et pertes de cuivre, courant à vide, facteur de puissance, échauffement et efficacité.
4) Dimensions principales de la machine
4-1) Dimensions principales du stator
Le diamètre de l'induit (ou alésage du stator) D et la longueur du noyau de l'induit (ou du stator) L
sont connus comme les dimensions principales d'une machine tournante
Figure 3 : Les dimensions principales du stator D et L

Ecole Supérieure en Génie Electrique et Energétique
Construction des Machines Electriques II
4
Pour calculer les dimensions principales de la machine et la puissance ainsi les performances
On commence par le calcul de la puissance apparente dans l’entrefer
(1)
Avec :
m: nombre de phase
Iph : le courant par phase
Eph : fem par phase
(2)
(3)
Le flux magnétique est
(4)
Avec :
Bg : l’induction magnétique dans l’entrefer
τ: le pas polaire
Le nombre totale de conducteur du stator est :
la charge électrique spécifique est :
→
Le courant dans chaque conducteur égale le courant de phase parce que il y a un seul circuit : Iz=Iph
Alors :
(5)
On remplace (2) (3) (4) (5) dans (1).
Finalement la formule de la puissance apparente
(6)
Avec C0 est le coefficient d’utilisation

Ecole Supérieure en Génie Electrique et Energétique
Construction des Machines Electriques II
5
(7)
Avec :
A : la charge de courant spécifique du stator (A/m),
Alors le produit D2L égale :
(8)
La longueur L est donnée :
Le facteur géométrique λ (coefficient de longueur) est donné en fonction de nombre de pair de
pole de la machine.
(9)
Ce facteur tient en compte de la géométrie et de l’économie de la réalisation de la machine.
Le diamètre D est :
Le rendement de la machine : est :
Le diamètre extérieur de stator :
L’expérience de construction des machines asynchrone nous donne les valeurs standard.
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%