Moteurs électriques et charges mécaniques - BTS Électrotechnique
Telechargé par
M O K 5 L I S 777

BTS électrotechnique 2ème année - Sciences physiques appliquées
CH1 : Les moteurs électriques et les charges mécaniques
Enjeu :
Motorisation des systèmes.
Problématique :
En tant que technicien supérieur, il vous revient la charge de
motoriser le chariot d’un portique de chargement de bateau.
En 1ère année, les forces mécaniques puis la puissance mises
en jeu dans le mouvement de translation pour répondre aux
contraintes du cahier des charges ont été calculées (voir
rappel de l’exercice 1 du TD)
Ce calcul permet dans un second temps de dimensionner le
moteur et le variateur de vitesse (programme de 2ème année).
Rapport au programme :
A3. SOLIDE ET FLUIDE EN MOUVEMENT
A3.3. Moteurs électriques et charges mécaniques
– Caractéristiques couple vitesse de quelques moteurs électriques
– Caractéristiques couple vitesse de diverses charges mécaniques : charges à couple constant,
parabolique ou hyperbolique
– Point de fonctionnement
– Critères de stabilité
Objectifs :
A l’issue de la leçon, l’étudiant doit :
1.1
Savoir déterminer un point de fonctionnement d’un couplage moteur/charge
mécanique.
1.2
Savoir utiliser le PFD pour prédire comment évolue un point de fonctionnement.
1.3
Savoir se prononcer sur la stabilité d’un point de fonctionnement.
1.4
Savoir déterminer l’évolution d’un point de fonctionnement dans les 4 quadrants pour
en déduire le mode de fonctionnement du moteur.
Travail à effectuer :
1. Réaliser la fiche résumée de la leçon en utilisant l’annexe.
2. Réponse à la problématique :
On cherche à tracer l’évolution du point de fonctionnement dans les 4 quadrants du moteur de la
problématique afin de déterminer les caractéristiques du variateur de vitesse qu’il faudra utiliser.
On rappelle que le moteur tourne à 1450tr/min lorsque le chariot se déplace à 3m/s. Le couple de la
machine est constant pendant la phase d’accélération et de décélération.
2.1 A partir des résultats des questions B.1 et B.2 de l’exercice 1 du TD et du profil de la puissance P,
tracer sur le document réponse le profil de la puissance utile Pu du moteur (on comptera Pu positif
lorsque le moteur fournit de la puissance mécanique)

2.2 Calculer pour chaque phase la valeur du couple utile du moteur.
2.3 En déduire le tracé du profil de ce couple sur le document réponse.
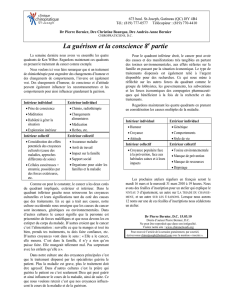
2.4 Tracer l’évolution du point de fonctionnement du moteur dans les 4 quadrants.
2.5 Indiquer sur ce diagramme les différents modes de fonctionnement du moteur (moteur AV,
freinage AR, etc).
2.6 Dans combien de quadrants le variateur de vitesse du moteur doit-il pouvoir fonctionner ?
2.7 Quelles sont les autres caractéristiques qu’il faudra déterminer pour dimensionner le variateur de
vitesse ?

Document réponse :
231 kW
- 231 kW
148 kW
- 148 kW
- 1520 Nm
- 974 Nm
974 Nm
1520 Nm
0
0
0
0

Diagramme 4 quadrants :
T (Nm)
n (tr/min)
975
1520
- 1520
-975
1450
- 1450

BTS électrotechnique 2ème année - Sciences physiques appliquées
Annexe 1 du CH1 : cours sur les associations moteurs/charges
mécaniques
1. Qu’est-ce que la caractéristique mécanique d’un moteur ?
Tout moteur électrique (et de manière équivalente pour les moteurs à combustion) est caractérisé, dans
des conditions électriques données (U, f), par sa caractéristique mécanique : Tu= f(n). Celle-ci retrace
l'évolution du moment du couple moteur en fonction de sa fréquence de rotation.
C’est la caractéristique la plus importante de la machine puisqu’elle donne l’ensemble des points de
fonctionnement (Tu ;Ω) possibles. Elle permet en outre d’apprécier si une machine est adaptée ou non à
la charge mécanique à entraîner.
2. Quelles sont les caractéristiques des moteurs les plus répandus ?
Les moteurs les plus répandus sont le moteur à courant continu (MCC), le moteur asynchrone (MAS) et
le moteur synchrone (MS). Ils ont les caractéristiques mécaniques respectives suivantes :
MCC :
MAS :
MS :
Tu
n
3. Quelles sont les différents types de charges ?
Une charge mécanique est caractérisée également par sa caractéristique mécanique moment du couple
résistant en fonction de la vitesse : Tr=f(Ω).
Les charges que l’on rencontre le plus sont :
les charges à couple constant Tr= cte représentées
par une droite horizontale.
C’est le cas pour de nombreuses machines-outils
(perceuse, …) et pour le levage.
Tr
les charges à couple proportionnel à la vitesse
Tr=aΩ, ce qui donne une droite qui passe par
l’origine.
C’est le cas des pompes hydrauliques.
Tr
n
 6
7
8
6
7
8
1
/
8
100%