1
MOTEURS ASYNCHRONES
TRIPHASÉS
Moteurs Asynchrones triphasés
E. S .I. DTS

2
DTS EAI 2
Moteurs Asynchrones triphasés
Objectifs: Connaître les éléments et caractéristiques fondamentaux du
moteur asynchrone
Compétences visées:
Être capable de :
➢Énoncer le principe de fonctionnement du moteur
asynchrone triphasé,
➢Connaître ses caractéristiques de fonctionnement,
➢Connaître les paramètres influençant sa marche
industrielle,
E. S .I.
Volume horaire : 9 heures
Types d’activités : CM = 6h ; TD = 3h

3
SOMMAIRE
I. GÉNÉRALITÉS
IV. ÉTUDES ÉLECTROMÉCANIQUES
V. BILAN DES PUISSANCES ET RENDEMENT
VII. UTILISATION PRATIQUE DU MOTEUR ASYNCHRONE
VI. ÉTUDE ÉLECTRIQUE-DIAGRAMME CIRCULAIRE SIMPLIFIÉ
VIII. MOTEUR ASYNCHRONE MONOPHASÉ
Moteurs Asynchrones triphasés
II. CONSTITUTION
III. FONCTIONNEMENT D’UN MOTEUR ASYNCHRONE
E. S .I.
DTS 2

4
Moteurs Asynchrones triphasés
E. S .I.
DTS

5
I. GÉNÉRALITÉS
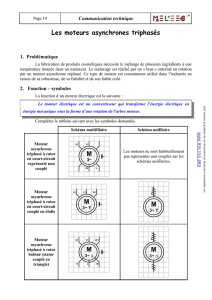
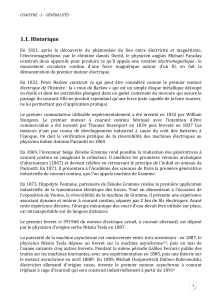
Moteur asynchrone :ou moteur d’induction est une machine électrique tournante
qui permet la transformation de l’énergie électrique en énergie mécanique pour
entrainer un mécanisme quelconque.
Moteur
asynchrone
Puissance électrique fournie
par l’alimentation électrique
(puissance absorbée)
Puissance mécanique
disponible sur l’arbre du
moteur (puissance utile)
Pertes
Moteurs Asynchrones triphasés
E. S .I.
DTS
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
1
/
63
100%