Cinématique du solide : Performances des chaînes de transmission
Telechargé par
José Kennedy

CHAÎNE D’INFORMATION
ACQUERIR TRAITER COMMUNIQUER
CHAÎNE D’ENERGIE
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
ACTION
CI4 : Performances des chaînes de transmission
CI4 : Performances des chaînes de transmission
CINEMATIQUE DU SOLIDE
TD
Edition 2 - 12/10/2018
!!
Lycée Jules Ferry - 06400 Cannes!ats.julesferry[email protected]!1/10
RELATION CINEMATIQUE D’UN
SYSTEME BIELLE-MANIVELLE

PROBLEMATIQUE
« Un système bielle-manivelle est un mécanisme de
transformation de mouvement que l’on rencontre dans de
nombreuses applications.
Nous chercherons à déterminer la vitesse de translation du
piston en fonction de la vitesse de rotation du vilebrequin »
B - MODELISER
B - MODELISER
B - MODELISER
B1 : Identifier et caractériser les grandeurs physiques
agissant sur un système
Proposer des hypothèses simplificatrices en vue de la modélisation
B2 Proposer un modèle de connaissance et de
comportement
Paramétrer les mouvements d’un solide indéformable
C - RESOUDRE
C - RESOUDRE
C - RESOUDRE
C1 : Choisir une démarche de résolution
Proposer une démarche permettant de déterminer une loi de mouvement
C2 : Procéder à la mise en œuvre d'une démarche
de résolution analytique
Déterminer la trajectoire d’un point d’un solide par rapport à un autre
C2 : Procéder à la mise en œuvre d'une démarche
de résolution analytique
Déterminer le vecteur vitesse d’un point d’un solide par rapport à un autre
C2 : Procéder à la mise en œuvre d'une démarche
de résolution analytique
Déterminer le vecteur accélération d’un point d’un solide par rapport à un
autre
CI4 : Performances des chaînes de transmission
CI4 : Performances des chaînes de transmission
CINEMATIQUE DU SOLIDE
TD
Problématique
Edition 2 - 12/10/2018
!!
Lycée Jules Ferry - 06400 Cannes!ats.julesferry[email protected]!2/10

!Sommaire
A. ___________________________________________________________Mise en situation!4
A.1.Extraits du cahier des charges!4
A.2.Paramétrage!4
B. ____________________________________________________Résolution du problème!5
B.1.Suite du paramétrage et mouvements!5
B.2.Fermeture cinématique!5
B.3.Résolution numérique!6
CI4 : Performances des chaînes de transmission
CI4 : Performances des chaînes de transmission
CINEMATIQUE DU SOLIDE
TD
Sommaire
Edition 2 - 12/10/2018
!!
Lycée Jules Ferry - 06400 Cannes!ats.julesferry[email protected]!3/10

A. Mise en situation
A.1. Extraits du cahier des charges
Nous nous intéressons dans ce TD à un compresseur, dont le dessin d’ensemble
est fourni en dernière page.
Le vilebrequin de compresseur est mis en rotation par un moteur à courant
continu dont la vitesse de rotation est égale à
Nm=300 tr / mn
Le cahier des charges spécifie :
Exigence 1 : la pression délivrée doit au moins être égale à
P=106Pa
(10 bar)
Exigence 2 : la puissance instantanée utile ne doit pas être supérieure à 600 W.
Il vous est demandé, par une étude cinématique et numérique, de vérifier que les
exigences du cahier des charges sont respectées
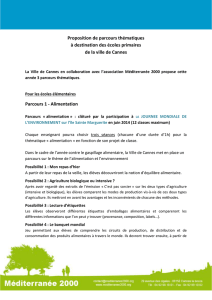
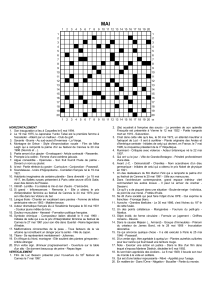
A.2. Paramétrage
OA
! "!!
=ay1
!"!
avec
a=25 mm
AB
! "!!
=−bx2
! "!
avec
b=55 mm
OB
! "!!
=−λx0
! "!
Par ailleurs, on donne les expressions suivantes, qui fournissent la pression et la puissance en fonction de λ :
!
P(λ)=55.10−3
90.10−3− λ
⎛
⎝
⎜
⎜
⎞
⎠
⎟
⎟
1,4
P0
!avec P(λ) pression en Pa, et P0=1,013.105 Pa pression atmosphérique
!
W(λ)=πD2
4P(λ)⋅!
λ
!avec W(λ) puissance en W, D diamètre du piston, P(λ) pression en Pa
CI4 : Performances des chaînes de transmission
CI4 : Performances des chaînes de transmission
CINEMATIQUE DU SOLIDE
TD
Mise en situation
Edition 2 - 12/10/2018
!!
Lycée Jules Ferry - 06400 Cannes!ats.julesferry[email protected]!4/10

B. Résolution du problème
B.1. Suite du paramétrage et mouvements
Objectif : on cherche dans cette partie à modéliser chacun des mouvements
dans le mécanismes par leurs torseurs cinématiques
Question 1
Proposer les figures de changement de base.
Ecrire les relations de changement de base correspondantes.
Question 2
Exprimer les vecteurs rotation
Ω1/0
! "!!!
,
Ω2/3
! "!!!
et
Ω3/0
! "!!!
.
En déduire par composition des mouvements les vecteurs rotation
Ω2/0
! "!!!
et
Ω2/1
! "!!
.
Question 3
Quel est le mouvement du vilebrequin 1 par rapport au bâti 0 ?
En déduire l’expression du torseur cinématique
ν1/0
{ }
au point de réduction le plus judicieux
Question 4
Même question avec le mouvement de la bielle 2 par rapport au vilebrequin 1
Question 5
Même question avec le mouvement du piston 3 par rapport à la bielle 2
Question 6
Même question avec le mouvement du piston 3 par rapport au bâti 0
B.2. Fermeture cinématique
Objectif : on cherche dans cette partie à établir la loi entrée-sortie cinématique
du mécanisme
Question 7
Par composition des mouvements, trouver la relation de fermeture cinématique du mécanisme
Question 8.
Choisir un point de réduction, et transporter tous les torseurs en ce point.
Question 9
Exploiter la fermeture cinématique afin de déterminer une relation entre la vitesse de translation du piston
!
λ
, la
vitesse de rotation du vilebrequin
!
α
et l’angle de la bielle
β
.
Question 10
Donner l’expression de β en fonction de α grâce à la loi des sinus dans le triangle OAB.
En déduire l’expression de β en fonction de a, b et α.
CI4 : Performances des chaînes de transmission
CI4 : Performances des chaînes de transmission
CINEMATIQUE DU SOLIDE
TD
Résolution du problème
Edition 2 - 12/10/2018
!!
Lycée Jules Ferry - 06400 Cannes!ats.julesferry[email protected]!5/10
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%