1
Statique
La statique, ou mécanique statique, est la branche de la physique (ou de la mécanique
rationnelle), qui étudie les systèmes mécaniques en équilibre et au repos (dans un repère
galiléen).
1.1 Degrés de liberté
Les simplifications de la mécanique du point reposent sur le fait que le point est
invariant par rotation, et que toutes les forces sont appliquées au point matériel. Alors les
forces suffisent à modifier sa position.
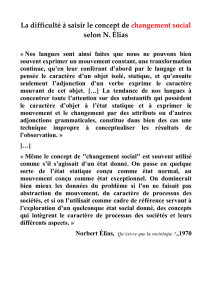
Pour les solides, constitués d'une infinité de points matériels, les déplacements possibles,
appelés aussi degrés de liberté, sont de deux natures :
Trois (03) translations selon les trois
(03) directions principales ;
Trois (03) rotations autour de ces
trois directions.
Alors que ;
les translations sont provoquées que par des forces ;
les rotations sont générées par les moments de ces forces, ou autres couples de force.
Donc l'équilibre d'un solide indéformable nécessite :
Le principe fondamental de la statique qui se compose :
1. La résultante des forces extérieures appliquées au le solide est nulle (pas de mouvement
de translations) .
2. Le moment de ces forces extérieures est nul ( pas de mouvement de rotations).
O
z
x
y
Ty
Tx
Tz
Rx
Rz
Ry

2
En d’autres termes :
1- Le premier principe stipule :
2- Le deuxième principe stipule :
Exercice 1
Une bille de poids P repose sur un support comme l’indique la figure ci-
à-droite. Calculer les réactions des plans sur la bille pour assurer
l’équilibre. On suppose que les frottements sont nuls. A.N : ,
,
Solution :
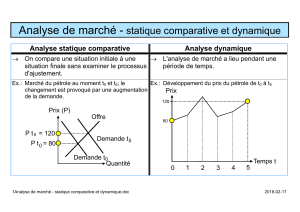
Le système réel (appelé système lié) est remplacé par réactions (appelé système libre) soumis
à l’action des forces données et des réactions de liaisons.
Méthode 1 :
Selon le 1ier principe de la statique :
Où :
: la résultante des forces extérieures
O
z
x
y
A1
A2
A3
Ai
An

3
(Eqt. 1)
Projection de l’Eqt. (1) sur l’axe
:
(Eqt.2)
Projection de l’Eqt. (1) sur l’axe
:
(Eqt.3)
En remplaçant Eqt.(3) dans Eqt.(2), on obtient :
et
Méthode 2 : (Règle des sinus)
En appliquant la règle des sinus (voir Chapitre 1. Page 8), on peut écrire :
Donc ;
et
A.N : , ,
et

4
Exercice 2
Un treuil de charge utile , pesant lui-même de
poids , est suspendu à une poutre de poids
négligeable dans les conditions indiquées par la
figure ci-dessous. Calculer, dans le cas de charge
maximum, les réactions d’appui et . A.N :
, , ,
Solution :
a- Le système réel est remplacé par système d’étude soumis à l’action des forces données
et des réactions de liaisons.
Soient en module l’action des forces données et les réactions de liaisons sont :
;
;
;
Puisque il s’agit d’un système de forces non concourantes on commence par :
a- Deuxième principe de la statique
On choisit le point (Eliminer le maximum d’inconnus) pour calculer le moment des forces
extérieures.

5
Si le point est pris comme origine alors les coordonnées des points , et .
; ;
Donc ;
;
;
;
;
;
;
De la troisième composante du vecteur moment
, on déduit :
le signe indique que la réaction
selon l’axe
au point C est dirigée vers le sens contraire.
Calcul des réactions
Selon le premier (1ier ) principe de la statique :
Selon l’axe
, la résultante vaut
Selon l’axe
, la résultante vaut
A.N : , , ,
 6
7
8
9
6
7
8
9
1
/
9
100%