Triphasé Moteur Asynchrone : 2TPN°0
1
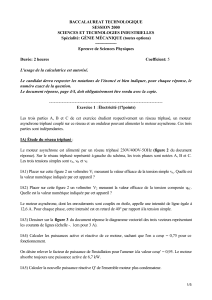
Introduction :
Le moteur asynchrone est constitué par deux enroulement l’un primaire
(stator) l’autre secondaire (rotor) la connaissance du rapport de transformation
sous permet de connaître la liaison entre les grandeurs statorique et rétorque en
effectuant deux autres essai la détermination au paramètres du schéma équivalant
du moteur asynchrone à bague sera établie.
1. But de TP :
1.1- Relevé des caractéristiques de fonctionnement d’un moteur asynchrone :
Caractéristique à vide.
Caractéristiques en charges.
Caractéristique en court-circuit.
Détermination les paramètres du moteur asynchrone.

Triphasé Moteur Asynchrone : 2TPN°0
2
Partie théorique
Fonctionnement à vide :
A vide le moteur n’entraîne pas de charge.
Conséquence : le glissement est nul est le moteur tourne à la vitesse de
synchronisme.
A vide g ≈ 0 donc ns = n.
Fonctionnement en charge :
Le moteur fournit maintenant de la puissance active, le stator appelle un courant
actif.
- Essai à vide: g = 0 nulle :
Les paramètres sont ramenés au stator (primaire).
On applique la tension nominale au moteur, et on laisse tourne a vide, la
puissance consommée est alors très faible celle correspond seulement aux pertes
fer dans le carcasse et aux perte rotation elles et le glissement est pratiquement
nul. Sur le circuit précédent ce ci signifier que la partie situe à la droite de la
branche shunt (dans secondaire) peut être considère comme un circuit ouvert (I2
très faible I1=I0). On mesure la puissance active absorbée, le courant et la tension
par phase : P0, I0, V0 .
On déduite le facteur de puissance correspondant à ces conditions :
0
I
0
V
0
P
COS
D’où les valeurs de RF et Xm

Triphasé Moteur Asynchrone : 2TPN°0
3
2
00
0
0
2
0)(
CosI P
P
v
RF
Xm=
00
0
SinI V
4.2. Essai à rotor bloqué g = 1 :
Les paramètres sont ramenés au stator (primaire).
On bloque le rotor et on alimente le moteur sous tension très réduite (15à 20%
de la tension nominal) la machine fonctionne alors comme un transformateur qui
aurait beaucoup de fuites de flux c’est maintenant la branche shunt du circuit
précédent qui est négligeable, puisque le courant de magnétisation et les perte fer
sont très réduites I0 faible Par ailleurs, le rotor étant bloque g =1 et la résistance
variable de la Droite est nulle.
On mesure la puissance active absorbe, le courant et la tension par phase : P1cc,
V1cc, I1cc.
On déduit le facteur de puissance correspondant à ces conditions :
1cc
I
1cc
V1cc
P
1cc
cos
D’où les valeurs des paramètres :
1cc
I1cc
Sin
1cc
V
r
Xa
S
X
a
X2
et
2
1cc
I
1cc
P
r
R
2
a
S
R
a
R
On peut ensuite calculer les valeurs individuelles de Rr, RS, Xr , Xs si on connaît
le rapport de transformation << d’équivalence >> a
m de la machine en mesurant
directement RS et Xs qui accessible.

Triphasé Moteur Asynchrone : 2TPN°0
4
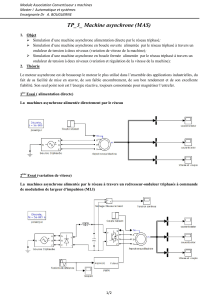
Partie pratique
2-Etude de la plaque signalétique de la machine
Tension: 220V,
50/60 Hz : fréquence,
Vitesse de rotation : 1420 tr/min
Pu = 0,3 kW : Puissance utile
Calcule la vitesse de synchronisme
On a la vitesse nominale est égale 1420tr/min on déduire la vitesse de
synchronisme est égale 1500tr/min
Le nombre de pôles
P=n/f p= 1500/50 p=2
g=( ns-n)/ ns g=( 1500-1420)/ 1500 g=5%
le moment du couple utile le fonctionnement nominale
Tu=Pu/Ω Tu=300/(1420 (2π/60))=2.01 N.m
le couplage du moteur Couplage étoile
3-Essais
3-1-Essais à vide :
MESURES
V10(v)
80
90
100
110
120
127
I10(A)
0.25
0.27
0.27
0.28
0.29
0.30
P10(w)
56.3
56
55.9
56.9
57.7
58.6
n0(tr/min)
1396.8
1423.2
1440
1452.6
1459.8
1465.2
CALCULS
Q10
36.68
46.67
58.61
72.8
87
98.13
Cos10
0.83
0.76
0.69
0.61
0.55
0.51
g0
0.068
0.0512
0.04
0.0316
0.033
0.023
1.on calcul RF :
200
0
0
2
0)(
CosI P
P
v
RF
RF =(127)^2/58.6=275.23 Ω .

Triphasé Moteur Asynchrone : 2TPN°0
5
0,24
0,25
0,26
0,27
0,28
0,29
0,3
0,31
050 100 150
I10
V10
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
050 100 150
COSφ10
U10
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
050 100 150
g10
U10
2. on calcul Xm :
cosφ= U10 / RF* I10
cosφ =127/(275.23*0.7) = 0.66
φ =48.70°
Et donc : sin φ =0.75. Xm=
00
0
SinI V
=127/(0.30*0.75) =225.1 Ω .
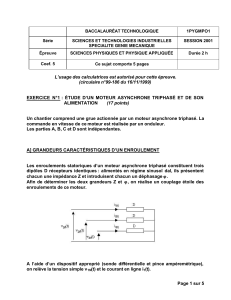
Le caractéristique I10=f(U10)
On note que la tension est
directement proportionnelle
au courant
Le caractéristique cosφ10=f(U10)
D'après l'énoncé, nous remarquons
que la tension est inversement
proportionnelle au facteur
de puissance
Le caractéristique g10=f(U10)
D'après l'énoncé, nous remarquons
que la tension est inversement
proportionnelle au glissement.
 6
7
8
6
7
8
1
/
8
100%