Université Rennes 2
Master de Statistique
Année 2012/2013
Premier Semestre
Régression linéaire
Arnaud Guyader
Ce cours est tiré des quatre premiers chapitres du livre de Pierre-André Cornillon et Eric Matzner-
Løber, Régression avec R, paru chez Springer en 2010.


Table des matières
1 La régression linéaire simple 1
1.1 Modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Moindres Carrés Ordinaires ............................... 2
1.2.1 Calcul des estimateurs de β1et β2....................... 3
1.2.2 Quelques propriétés des estimateurs ˆ
β1et ˆ
β2. . . . . . . . . . . . . . . . . 4
1.2.3 Calcul des résidus et de la variance résiduelle . . . . . . . . . . . . . . . . . 7
1.2.4 Prévision ..................................... 8
1.3 Interprétations géométriques ............................... 9
1.3.1 Représentation des variables ........................... 9
1.3.2 Le coefficient de détermination R2....................... 10
1.4 Cas d’erreurs gaussiennes ................................ 11
1.4.1 Estimateurs du maximum de vraisemblance . . . . . . . . . . . . . . . . . . 11
1.4.2 Rappels sur les lois usuelles ........................... 12
1.4.3 Lois des estimateurs et régions de confiance . . . . . . . . . . . . . . . . . . 13
1.4.4 Prévision ..................................... 15
1.5 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.6 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7 Corrigés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2 La régression linéaire multiple 29
2.1 Modélisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2 Estimateurs des Moindres Carrés Ordinaires . . . . . . . . . . . . . . . . . . . . . . 31
2.2.1 Calcul de ˆ
β.................................... 31
2.2.2 Quelques propriétés ............................... 33
2.2.3 Résidus et variance résiduelle . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2.4 Prévision ..................................... 36
2.3 Interprétation géométrique ................................ 37
2.4 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.5 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.6 Corrigés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3 Le modèle gaussien 49
3.1 Estimateurs du Maximum de Vraisemblance . . . . . . . . . . . . . . . . . . . . . . 49
3.2 Lois des estimateurs ................................... 50
3.2.1 Quelques rappels ................................. 50
3.2.2 Nouvelles propriétés ............................... 51
3.2.3 Intervalles et régions de confiance . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2.4 Prévision ..................................... 54
3.3 Tests d’hypothèses .................................... 56
3.3.1 Introduction .................................... 56
i

ii Table des matières
3.3.2 Tests entre modèles emboîtés . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.3.3 Test de Student de signification d’un coefficient . . . . . . . . . . . . . . . . 60
3.3.4 Test de Fisher global ............................... 60
3.3.5 Lien avec le Rapport de Vraisemblance Maximale . . . . . . . . . . . . . . . 60
3.4 Estimation sous contraintes ............................... 62
3.5 Exemple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.6 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.7 Corrigés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4 Validation du modèle 81
4.1 Analyse des résidus .................................... 81
4.1.1 Résidus et valeurs aberrantes . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.1.2 Analyse de la normalité ............................. 84
4.1.3 Analyse de l’homoscédasticité . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.1.4 Analyse de la structure des résidus ....................... 85
4.2 Analyse de la matrice de projection ........................... 88
4.3 Autres mesures diagnostiques .............................. 90
A Annales 93
B Rappels d’algèbre 131
B.1 Quelques définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
B.2 Quelques propriétés .................................... 131
B.2.1 Les matrices n×p................................ 131
B.2.2 Les matrices carrées n×n. . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
B.2.3 Les matrices symétriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
B.2.4 Les matrices semi-définies positives . . . . . . . . . . . . . . . . . . . . . . . 132
B.3 Propriétés des inverses .................................. 132
B.4 Propriétés des projections ................................ 133
B.4.1 Généralités .................................... 133
B.4.2 Exemple de projection orthogonale . . . . . . . . . . . . . . . . . . . . . . . 133
B.4.3 Trace et éléments courants . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
B.5 Dérivation matricielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
C Rappels de probabilité 135
C.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
C.2 Vecteurs aléatoires gaussiens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
C.3 Tables des lois usuelles .................................. 137
C.3.1 Loi Normale X∼ N(0,1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
C.3.2 Loi de Student X∼ Tν.............................. 138
C.3.3 Loi du Khi-deux à νddl X∼χ2
ν. . . . . . . . . . . . . . . . . . . . . . . . 139
C.3.4 Loi de Fisher à ν1, ν2ddl X∼ Fν1
ν2. . . . . . . . . . . . . . . . . . . . . . . 140
D Quelques données 141
Bibliographie 143
Arnaud Guyader - Rennes 2 Régression

Chapitre 1
La régression linéaire simple
Introduction
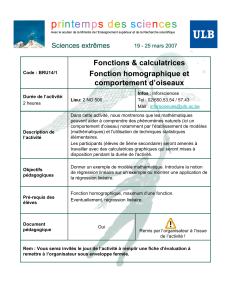
Commençons par un exemple afin de fixer les idées. Pour des raisons de santé publique, on s’in-
téresse à la concentration d’ozone O3dans l’air (en microgrammes par millilitre). En particulier,
on cherche à savoir s’il est possible d’expliquer le taux maximal d’ozone de la journée par la
température T12 à midi. Les données sont :
Température à 12h 23.8 16.3 27.2 7.1 25.1 27.5 19.4 19.8 32.2 20.7
O3max 115.4 76.8 113.8 81.6 115.4 125 83.6 75.2 136.8 102.8
Table 1.1 – 10 données journalières de température et d’ozone.
D’un point de vue pratique, le but de cette régression est double :
— ajuster un modèle pour expliquer O3en fonction de T12 ;
— prédire les valeurs d’O3pour de nouvelles valeurs de T12.
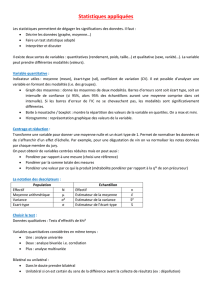
Avant toute analyse, il est intéressant de représenter les données, comme sur la figure 1.1.
10 15 20 25 30
80 90 100 110 120 130
T12
O3
Figure 1.1 – 10 données journalières de température et d’ozone.
Pour analyser la relation entre les xi(température) et les yi(ozone), nous allons chercher une
fonction ftelle que :
yi≈f(xi).
Pour préciser le sens de ≈, il faut se donner un critère quantifiant la qualité de l’ajustement de la
fonction faux données. Il conviendra aussi de se donner une classe de fonctions Fdans laquelle
est supposée vivre la vraie fonction inconnue.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
1
/
147
100%