Chapitre 3 : Cinématique des fluides.
La cinématique et les études des mouvements des liquides s'en tenir compte des forces qui lui
donne naissance en étudier seulement la relation entre les positions des particules fluides et le temps. Le
mouvement de fluide est décrit par deux méthodes :
- 1) Méthode lagrangienne : (1736 - 1813)
Elle consiste à suivre chaque particule matérielle prise individuellement dans son mouvement au cours du
temps.
Soit un point M de la masse fluide avec les coordonnées en fonction du temps et de la position initiale :
La vitesse
peut être calculé par :
L’accélération calculé par :
Les avantages de la représentation lagrangienne sont :
la trajectoire de chaque particule est connue
la conservation de la masse est satisfaite
Les inconvénients : sont lié au fait que les fluides sont composés d'un très grand nombre de
particules.
La méthode de lagrangienne n'est pas pratique pour des applications réelles.
- 2) Méthode eulérienne : (1707 – 1783) Léonard Euler
Consiste à établir un instant t donner l'ensemble des vitesses associer à chaque point de l’espace occupé
par le fluide.
La représentation mathématique de la méthode eulérienne s'écrit pour la vitesse :
ou
et
x, y, z sont les variables de Lagrange
Sont les coordonnées initiale de x, y, z au temps t.

Les composantes de champ de vitesse s’expriment sous la forme :
3) vitesse et accélération :
a) vitesse :
Soit
la vitesse en n'importe quel point du liquide, sont les composantes de cette vitesse :
Donc :
b) accélération :
Soit les composantes de l’accélération :
4) Ligne de courant et trajectoire :
On appelle ligne de courant la courbe qui, en chacun de ces points et tangente au vecteur vitesse.
On peut décrire l'équation différentielle des lignes de courant :
Dérivée particulaire
Dérivée temporelle
Dérivée convective

Pour un écoulement stationnaire (permanent) il y a coïncidence entre ligne de courant et trajectoire.
Les équations paramétriques différentielles des trajectoires sont définies par :
On peut observer différentes types de régimes dans l'écoulement d'un fluide :
● régime permanent (stationnaire) : ne dépend pas de temps
● régime uniforme la vitesse ne dépend pas du point considéré
● régime laminaire : les couches de fluide glissent les unes par rapport aux autres. les vitesses
sont continues.
● régime turbulent : les vitesses sont discontinues les couches de fluide s’interpénètrent de façon
aléatoire.
5) Conservation de la masse :
5-1) Equation de continuité :
L’équation de continuité traduit le principe de conservation de la masse : la Variation de masse pendant
un temps d'un élément de volume fluide entrant diminuée de celle du fluide sortant.
On appelle trajectoire le lieu géométrique des
positions successives occupé par une particule.
Trajectoire de la particule
P
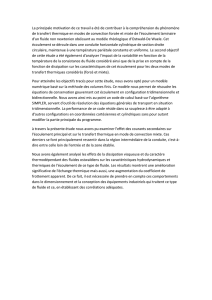
On considère un élément de volume fixe d'un fluide :
,
Sa masse s'exprime comme :
.
La variation de cette masse pendant s’écrit :

Cette variation de la masse doit être égale à la somme des masses de fluide qui entre et sort par les 6
faces de l'élément de fluide.
- suivant l'axe :
La masse entrant pendant le temps est : Et la masse sort par.
Le bilan sur l'axe donne :
.
Un développement de premier ordre permet d’écrire :
Il reste alors :
suivant l'axe
Par analogie sur les deux autres axes on trouve :
suivant l’axe.
suivant l’axe.
Au total on a :
La conservation de la masse du volume s’écrit :
Alors l'équation de Continuité qui traduit le principe de la conservation de la masse :
Ou bien :
Avec :
Remarque :
Écoulement permanent :
Un fluide incompressible :
5-2) Débit massique, et débit volumique :
Le débit volumique à travers la surface note: ,
Le débit masse à travers une section et la quantité de fluide qui traverse
la section par unité de temps. Noté par ou
Est orienté dans le sens de l'écoulement.
Avec : sont les composantes
de vecteur vitesse.

6) Fonction de courant et potentiel des vitesses :
5-1) fonction de courant :
La fonction de courant décrit les lignes de courant dans l’espace, on vient de voir que pour un écoulement
incompressible :
si on pose
alors
.
et appelé potentiel vecteur
En coordonnées cartésiennes
Si on considère un écoulement plan :
D’où :
on pose :
La fonction est appelée fonctions de courant.
Champ de vitesse en coordonnées cartésien
Ou bien
En coordonnées cylindriques.
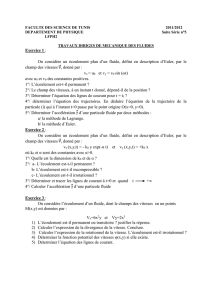
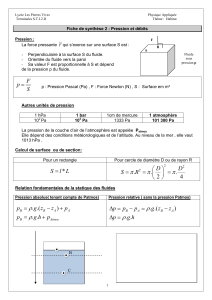
Toutes les lignes de courant s'appuyant sur une même
courbe fermée constituent une surface appelée tube de
courant.
Si l'écoulement est permanent alors :
On dit que : le débit est conservé.
 6
6
1
/
6
100%