Chapitre 3
Filtres et analyse fr ´
equentielle
On cherche maintenant
`
a analyser le comportement de circuits en termes de fr
´
equence.
On analyse donc les tensions et courants lorsque la fr´
equence est variable.
Si on fait varier la fr
´
equence d’op
´
eration d’un circuit, l’imp
´
edance des capacitances et
inductances variera aussi. Il est important de bien comprendre le comportement de ces
´
el
´
ements lorsque la fr
´
equence varie. On verra qu’un choix judicieux de ces composantes
permettra de cr
´
eer des circuits o
`
u on peut bloquer ou laisser passer des signaux de certaines
fr´
equences voulues. On appelle ce genre de circuit un filtre.
En fait, un filtre pratique ne permet pas d’
´
eliminer compl
`
etement certaines fr
´
equences :
il y a plut
ˆ
ot une
att´
enuation
. Les signaux des fr
´
equences non voulues sont att
´
enu
´
ees de
fac¸on assez significative.
On se concentre dans ce chapitre sur une analyse des quatre types de filtres : passe-bas,
passe-haut, bande passante, et filtre coupe-bande. On verra aussi une m
´
ethode pour tracer
la r´
eponse de ces filtres en fonction de la fr´
equence, soit le diagramme de Bode.
3.1 Caract ´
eristiques de base
On pr
´
esente ici certaines caract
´
eristiques de base des filtres. Pour accomplir ceci, on se
sert de la fonction de transfert du circuit, o
`
u on consid
`
ere l’entr
´
ee et la sortie comme
´
etant
des tensions. On cherche donc la fonction de transfert H(s) = Vo(s)/Vi(s) du circuit.
Voici quelques termes importants :
1

CHAPITRE 3. FILTRES ET ANALYSE FR ´
EQUENTIELLE
1. Bande passante
: C’est l’
´
etendue des fr
´
equences entre lesquelles un signal
`
a l’entr
´
ee
passe `
a la sortie.
2. Bande att´
enu´
ee :
C’est l’
´
etendue de fr
´
equences o
`
u l’amplitude d’un signal est
att´
enu´
e de sorte qu’il n’apparaˆ
ıt pas `
a la sortie.
Les filtres sont caract
´
eris
´
es selon leur r
´
eponse en fr
´
equence. La variation de l’amplitude
en fonction de la fr
´
equence est le crit
`
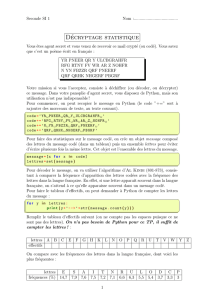
ere le plus important. On peut voir les diff
´
erents types
de filtres `
a la figure 3.1.
Bande
passante
ω
|H(jω)|
1
ωc
0
(a) Passe-bas
Bande
passante
ω
|H(jω)|
ωc
1
0
(b) Passe-haut
Bande
passante
ω
|H(jω)|
ωc1ωc2
1
0
(c) Passe-bande
Bande
passante
Bande
passante
ω
|H(jω)|
1
ωc1ωc2
0
(d) Rejet
Figure 3.1 – Classification des filtres
Les courbes id
´
eales de la figure 3.1 montrent les quatre types de filtres principaux. Les
deux premiers, le filtre passe-bas et le filtre passe-haut, ont tous deux une bande passante
et une bande att
´
enu
´
ee. La fr
´
equence qui s
´
epare les deux bandes est appel
´
ee la
fr´
equence
de coupure
. Le nom de ces filtres vient de la r
´
egion dans laquelle les fr
´
equences passent de
l’entr
´
ee
`
a la sortie : pour un passe-bas, ce sont les fr
´
equences plus faibles que la fr
´
equence
de coupure qui passent, tandis que pour le passe-haut, ce sont les fr
´
equences plus
´
elev
´
ees
qui passent. Les termes bas et haut sont relatifs ici; ils ne font r
´
ef
´
erence qu’
`
a la fr
´
equence
de coupure.
Les deux autres types de filtres ont deux fr
´
equences de coupure. Le filtre passe-bande
permet de passer seulement les fr
´
equences entre les deux fr
´
equences de coupure ; le filtre
`
a rejet (ou filtre coupe-bande) laisse passer tout sauf ce qui est entre les deux fr
´
equences
de coupure.
Gabriel Cormier 2 GELE3333

CHAPITRE 3. FILTRES ET ANALYSE FR ´
EQUENTIELLE
3.2 Filtres passe-bas
On analysera ici trois types de filtres : deux filtres passifs, soit le filtre RL s
´
erie et RC
s´
erie, et l’implantation avec ampli-op d’un filtre passe-bas.
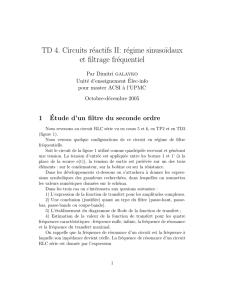
3.2.1 Circuit RL s ´
erie
Le circuit du filtre RL s
´
erie est montr
´
e
`
a la figure 3.2. L’entr
´
ee du circuit est une tension
sinuso
¨
ıdale de fr
´
equence variable. La sortie du circuit est la tension aux bornes de la
r´
esistance.
+
−
vi
L
R
+
−
vo
Figure 3.2 – Filtre passe-bas (RL s´
erie)
On peut analyser ce circuit de fa
c¸
on qualitative pour voir s’il fonctionne comme un
filtre passe-bas. En effet,
`
a de basses fr
´
equences, l’inductance (dont l’imp
´
edance est
jωL
),
agit comme un court-circuit. La tension de la source se rend donc
`
a la r
´
esistance.
`
A hautes
fr
´
equences, l’inductance agira comme un circuit ouvert, puisque son imp
´
edance sera tr
`
es
´
elev
´
ee. Il n’y a donc pas de signal qui se rend
`
a la r
´
esistance. On voit bien que ce circuit est
un filtre passe-bas : les signaux de basse fr
´
equence se rendent
`
a la sortie, tandis que ceux
de hautes fr´
equences ne s’y rendent pas.
Fr´
equence de coupure
La fr
´
equence de coupure pour des filtres r
´
eels est la fr
´
equence
`
a laquelle l’amplitude de
sortie est `
a 1/√2 de la valeur maximale :
|H(jωc)|=1
√2Hmax (3.1)
C’est la d
´
efinition la plus utilis
´
ee en g
´
enie
´
electrique. Le terme 1
/√2
peut para
ˆ
ıtre arbitraire,
mais `
a cette tension, la puissance a diminu´
e de moiti´
e.
Gabriel Cormier 3 GELE3333

CHAPITRE 3. FILTRES ET ANALYSE FR ´
EQUENTIELLE
Le circuit RL s
´
erie peut
ˆ
etre analys
´
e pour d
´
eterminer sa fr
´
equence de coupure. On
cherche alors la fonction de transfert du filtre :
H(s) = R/L
s+R/L (3.2)
Pour ´
etudier la r´
eponse en fr´
equence, on fait la substitution s=jω :
H(jω) = R/L
jω +R/L (3.3)
On s
´
epare cette derni
`
ere
´
equation en deux parties : une pour l’amplitude, et l’autre
pour la phase.
|H(jω)|=R/L
pω2+ (R/L)2(3.4)
θ(jω) = −tan−1ωL
R(3.5)
`
A l’aide de l’´
equation 3.1, on peut calculer la fr´
equence de coupure de ce filtre :
|H(jω)|=1
√2(1) = R/L
pω2+ (R/L)2(3.6)
et on r´
esout pour obtenir
ωc=R
L(3.7)
L’
´
equation 3.7 donne un r
´
esultat important : on peut choisir la fr
´
equence de coupure
voulue en faisant un choix appropri´
e de Ret L.
Exemple 1
L’
´
electrocardiographie est l’
´
etude des signaux
´
electriques g
´
en
´
er
´
es par le coeur. Un
´
electro-cardiographe doit ˆ
etre capable de d´
etecter des signaux d’une fr´
equence d’environ
1Hz (une personne normale aura un battement d’environ 72 battements par minute) et doit
ˆ
etre capable d’
´
eliminer le bruit caus
´
e par les appareils qui op
`
erent
`
a 60Hz, la fr
´
equence du
r´
eseau ´
electrique.
Faire le design d’un filtre RL s
´
erie qui permet de d
´
etecter les fr
´
equences du coeur et
´
eliminer le bruit d
ˆ
u aux appareils
´
electriques. Calculer l’amplitude
`
a 60Hz pour v
´
erifier la
performance du filtre.
Gabriel Cormier 4 GELE3333

CHAPITRE 3. FILTRES ET ANALYSE FR ´
EQUENTIELLE
Il faudra premi
`
erement choisir une fr
´
equence de coupure pour le filtre. Cette fr
´
equence
doit
ˆ
etre entre 1Hz et 60Hz, selon les donn
´
ees du probl
`
eme. Il ne faut pas que la fr
´
equence
choisie soit trop pr
`
es de 1Hz, car le signal risquerait d’
ˆ
etre un peu att
´
enu
´
e. On choisit 10Hz
comme fr´
equence de coupure. On a donc :
ωc= 2πf = 20πrad/s
Il reste
`
a d
´
eterminer la r
´
esistance et l’inductance
`
a utiliser, selon l’
´
equation 3.7. Il
est plus facile de choisir l’inductance en premier, puisque celles-ci ne sont disponibles
qu’
`
a certaines valeurs. Il y a bien plus de choix pour les r
´
esistances. On prend une valeur
commune d’inductance, soit L= 100mH. La r´
esistance n´
ecessaire sera donc :
R=ωcL= 6.28 Ω
On peut calculer l’amplitude `
a la sortie,
|Vo(ω)|=R/L
pω2+ (R/L)2|Vi|=20π
√ω2+ 400π2|Vi|
`
A 1Hz, l’amplitude
`
a la sortie est 0.995 de la valeur de l’entr
´
ee.
`
A 10Hz, c’est 0.707 (ce
qui doit
ˆ
etre la valeur
`
a la fr
´
equence de coupure) et
`
a 60Hz c’est 0.164. Le bruit
`
a 60Hz est
att´
enu´
e d’un facteur de 6 environ par le filtre.
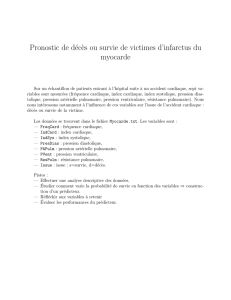
3.2.2 Circuit RC s ´
erie
Un circuit RC s
´
erie peut aussi servir de filtre passe-bas. Dans ce cas-ci, la sortie est sur
la capacitance et non la r
´
esistance, contrairement au circuit RL s
´
erie. Le circuit est montr
´
e
`
a la figure 3.3.
+
−
vi
R
C
+
−
vo
Figure 3.3 – Filtre passe-bas (RC s´
erie)
On peut faire la m
ˆ
eme sorte d’analyse qualitative que pour le circuit RL s
´
erie.
`
A basses
fr
´
equences, la capacitance se comporte comme un circuit ouvert, et donc la tension aux
Gabriel Cormier 5 GELE3333
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%