Diagnostic des défauts machine asynchrone par analyse spectrale
Telechargé par
abdollahlouahdi

1
DIAGNOSTIC DES DEFAUTS DE LA
MACHINE ASYNCHRONE PAR ANALYSE
SPECTRALE
Pr. SIDKI Mohammed
Université Mohamed V-Ecole Mohammadia d’Ingénieurs
BP 765- Agdal, Rabat MAROC
-Résumé- Les machines asynchrones sont très utilisées dans les
systèmes d'entraînements électriques, à cause de leur
robustesse, leur puissance massique et à leur coût de
fabrication.Pour assurer Leur maintenance et leur surveillance
,il est donc important de développer des outils de diagnostic
pour détecter de manière précoce les défauts pouvant
apparaître dans ces machines.
Nous présentons Les résultats d’une simulation numérique de
la modélisation de défauts de court circuit d’une machine
asynchrone en utilisant l’analyse spectrale en vue de son
diagnostic.
Mots clés- machine asynchrone, analyse spectrale,
maintenance électrique.
I- INTRODUCTION
Les défauts dans les entraînements électriques se
répartissent en deux catégories: défauts qui se produisent
dans la machine électrique (défauts des roulements,
inclinaison de l’axe) et ceux qui se produisent dans la chaîne
d’entraînement à l’extérieur de la machine. Notre étude est
restreinte aux problèmes électriques qui se développent dans
la machine électrique.
II- ETUDE DES DEFAUTS DE LA MACHINE
ELECTRIQUE.
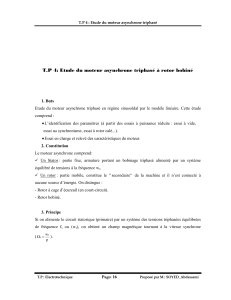
Les causes des défauts sont multiples. Elles
peuvent êtres classées en trois groupes:
- Groupe A: Echauffement du moteur, défaut électrique
(court-circuit), problèmes mécaniques, rupture de fixations,
problème d’isolation, survoltage d’alimentation etc…
-Groupe B: surcharge fréquente, vibrations mécaniques ,
environnement humide, alimentation perturbée (instabilité
de la tension ou de la fréquence), échauffement permanent,
mauvais graissage, vieillissement…
- Groupe C: les erreurs humaines, défauts de fabrication,
défectuosité des composants, protections inadaptées,
mauvais dimensionnement de la machine.
Ces défauts se répartissent selon la figure [1]
1- LES DEFAUTS DE COURT CIRCUIT ENTRE
SPIRES ROTORIQUES
Dans le cas d’un moteur asynchrone triphasé, cette
défaillance se traduit par une augmentation de la résistance
équivalente d'un enroulement rotorique. Elle induit des
ondulations du couple électromagnétique et des oscillations
de la vitesse de rotation du moteur ce qui engendre des
vibrations mécaniques donc un fonctionnement anormal de
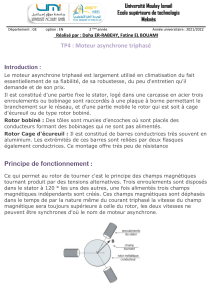
la machine. Pour détecter le défaut, nous nous devons
prélever un signal révélateur. Pour cela, nous pouvons soit
effectuer une analyse à partir du flux rayonnant, soit une
analyse de la vitesse de rotation ou du courant absorbé.
Figure [2].
Pour certains défauts rotoriques, les ondulations de
vitesse de rotation sont peu importantes et ne nous
renseignent pas sur l’information caractéristique de
l’importance du défaut rotorique. Prenons le cas d'un moteur
Figure 1 : La répartition des pannes dans la machine
Figure 2 : Les points de mesure
Revue Interdisciplinaire Vol1, n°1 (2016)

2
ayant un rotor sain, les courants des trois phases statoriques
créent dans l'entrefer un flux tournant à la vitesse synchrone
Ωs=ω/p. Ce flux balaye les bobines rotoriques ce qui
provoque la rotation de l'arbre du moteur.
La vitesse rotorique augmente et atteint une vitesse Ωr
inférieure à la vitesse de synchronisme Ωs, les enroulements
rotoriques sont alors balayés par le flux à la vitesse Ω = Ωs-
Ωr. le champ créé par les enroulements rotoriques est direct
(c'est à dire qu'il tourne dans le même sens de rotation que
le champ créé par les courants statoriques) et la fréquence
des courants dans les enroulements rotoriques est égale à g.fs
avec g représentant le glissement de la machine et fs la
fréquence des courants statoriques.
Le schéma de la figure [3] permet une meilleure
compréhension du fonctionnement d’un moteur asynchrone
avec un rotor sain, d’où les relations suivantes:
- Ωs = 2 Π fs/p, vitesse de synchronisme,
- Ωr = (1-g) Ωs, vitesse de rotation,
- Ω = Ωs – Ωr, vitesse de glissement,
- g = Ω / Ωs, le glissement.
Lorsque le défaut rotorique apparaît, il se crée en plus du
champ rotorique direct un champ inverse qui tourne à la
vitesse –g.Ωs. Cela est dû suite au déséquilibre des
résistances. C’est l'interaction de ce champ avec celui issu
du bobinage statorique qui crée les ondulations de couple et
qui induit au stator des forces électromotrices.
Les champs créés par ces courants vont induire, par
conséquent, au rotor des courants directs et inverses. Donc
par le même processus que celui décrit précédemment, on
retrouvera des composantes dans le courant statorique de
fréquences (1+2kg)fs et (1-2kg)fs, avec k entier positif.
Le schéma de la figure [4] décrit le phénomène dû à
l'apparition du défaut rotorique.
La vitesse de rotation suite à cette défaillance s’écrit:
- = - g = (1-g) - g ,
- = (1-2g) ,
Ce qui donne dans le domaine fréquentiel :
fdéfaut = (1-g) fs – g fs = (1-2g) fs
2 - LES DEFAUTS DE COURT CIRCUIT ENTRE SPIRES
STATORIQUES
L’apparition d’un defaut au niveau du stator d’une machine
asynchrone est principalement due soit à un problème:
-Electrique
-Thermique
-Mécanique
-Environnemental
Mais le défaut de court circuit entre spires de la même phase
est très fréquent dans le stator Figure [5]. Il est dû
essentiellement à la dégradation de l’isolant. Ce pendant ce
défaut provoque une élévation de la température dans
l’enroulement et une augmentation de l’intensité des
courants statoriques.
Les fréquences de court-circuit entre les spires des
enroulements statoriques sont données par la relation
suivante [1]:
[1]
Avec:
- : fréquence " de court-circuit ",
- f: fréquence d’alimentation,
- n: 1, 2, 3……..,
Figure 3 : schéma de fonctionnement pour un rotor sain
Figure 4 : schéma de fonctionnement pour un rotor défaillant
Figure 5 : Représentation schématique d’un défaut de
Court-circuit entre spires

3
- p: nombre de paires de pôles,
- g: le glissement,
- k: 1, 3, 5,…….,
Nous avons présentés les différents défauts
électriques qui peuvent apparaitre dans la machine
électrique, ainsi que les différentes fréquences associées.
Parmi toutes les fréquences observables et observées, il
existe des fréquences identiques à celles des fréquences des
défauts tels que l’excentricité qui peuvent perturber
l’analyse de la défaillance.
III- SIMULATION NUMERIQUE DES DEFAUTS DE
COURT CIRCUIT DANS LA MACHINE
ASYNCHRONE
Pour aborder la simulation des défauts de court-
circuit entre spires, nous avons modélisé la machine
asynchrone en MATLAB pour mettre en évidence le
comportement du moteur asynchrone dans les deux cas
(moteur sain ou la présence d’une défaillance). Les tensions
appliquées aux trois bobinages statoriques sont:
Où représente la pulsation des trois tensions appliquées.
Etant données que ces équations obtenues sont non linéaires
et qu’une méthode numérique doit être mise en œuvre pour
parvenir à la solution, nous avons choisi la méthode explicite
et classique de Runge Kutta.
Pour la convergence, il faut évaluer le maximum du pas de
simulation ∆tmax, en choisissant
la trace de la matrice - ([B]) issue de la relation
En prenant :
La trace de cette matrice nous est donnée par: ∑ λi =1/Ti, le
pas de simulation sera alors:
Nous allons maintenant nous intéresser au résultat obtenu
par ce modèle, lorsque le moteur présente dans un premier
temps une défaillance rotorique, et ensuite un défaut
statorique.
VI- RESULTATS DE SIMULATION DU DIAGNOSTIC
DU MOTEUR
Afin d’étudier le comportement du moteur et la validation
du modèle nous avons simulé un couple de 100 N.m qui
représente le couple nominal de la machine réelle étudiée.
Les figures [6], [7], [8] représentent respectivement
l’évolution du courant statorique, courant rotorique et le
couple électromagnétique, pour un rotor défaillant ayant un
défaut de court circuit entre spires. Cette défaillance
rotorique provoque une élévation de la résistance de
l’enroulement en question. Nous pouvons remarquer que
l’évolution du courant absorbé par le moteur asynchrone en
absence et en présence de défaillance ressemble très
fortement à un signal temporel modulé en amplitude [6].
Ces courbes obtenues par simulations présentent des
ondulations, donc cette analyse directe de l’amplitude du
courant ne permet pas d’extraire toutes les informations.
Donc il est preferable d’analyser les signaux par l’analyse
spectrale, basée sur la Transformée de Fourier Rapide afin
de ressortir toutes les informations les plus représentatives
des défauts étudiés Figures [9], [10], [11].
Cette analyse spectrale du courant statorique permet de
décerner les raies qui correspondent aux fréquences de
défauts rotoriques et statoriques autour de la fréquence
fondamentale. Les spectres du courant statorique obtenus
par simulation représentent respectivement le
fonctionnement d’un moteur asynchrone sain [9], avec un
défaut rotorique [10] et un défaut statorique [11].
Les fréquences engendrées, autour de la fréquence
fondamentale de l’alimentation, par un défaut au sein de
l’anneau, pour k=1,2,3 (Voir Tableau [1])
Moteur
sain
Stator
défaillant
Rotor
défaillant
Fréquence( Hz)
50
50
45
150
50
55
Tableau [1] : Résultat des fréquences de défauts obtenues par
simulation

4
Figure [6] : Courant statorique (rotor défaillant)
Figure [9] : Spectre du courant statorique pour moteur sain
(f=50HZ)
Figure [7] : Courant rotorique (rotor défaillant)
Figure [8] : Couple électromagnétique (rotor défaillant)
Figure [10] : Spectre du courant statorique (stator défaillant
(f1=50hz , f2= 150hz )
Figure [11] : Spectre du courant statorique (rotor défaillant
(f1=50hz , f2= 55hz ; et f3=45hz)

5
VI- CONCLUSION
Nous avons présenté les résultats de simulation de l’analyse
spectrale de courant statorique, lorsqu’un défaut de
court-circuit apparait sur le moteur asynchrone triphasé.
Le traitement du signal se fait sans aucune modification de
l’installation dans laquelle la machine asynchrone opère.
Cette analyse fréquentielle permet de détecter et de
quantifier la nature de défaut afin d’intervenir sur le moteur
avant qu’un dysfonctionnement ou un arrêt complet de la
machine. On peut généraliser ces résultats obtenus pour
caractériser d’autres types de défauts et aussi par
l’intégration des algorithmes sur une carte DSP avec une
logique de décision pour la signalisation des défauts.
VII-REFERENCES
[1] B. A. Lloyd, J. Penman, H. G. Sedding, et W .T. Fink,”Detection and
location of interturn short-circuits in the stator windings of operating
motors”. Dans IEEE Winter Power Meeting, February 1994.
[2] E .Schaeffer, T. Gouraud, C. Doncarli, et M. E. Zaïm, ”Simulation
and detection of faults in induction machines under varying speed”,
Proceeding of the 1997 IEEE International Symposium on
diagnostics for electrical machines, power electronics and drives,
page 3/8,1997.
[3] E. Schaeffer, E. Le Carpentier, M. E. Zaïm, et L. Loron,’’Détection
de courts- circuits statoriques dans la machine asynchrone ’’, Dans
17 colloque GRETSI sur et Traitement du Signal et des Images,
volume 4, pages 1037 –1040, Vannes, France, 13-17 septembre
1999.
1
/
5
100%