Alimentations Petites et Moyennes Puissances : Cours d'Électronique
Telechargé par
Anselme Kassegne

I. ALIMENTATIONS DE PETITES ET MOYENNES
PUISSANCES.
1.1. Généralité.
Actuellement, l’énergie électrique est produite et transportée principalement sous forme de
courant alternatif. Les deux avantages de l’utilisation du courant alternatif sont les suivants :
Premièrement, à l’aide des transformateurs, il est aisé d’élever ou d’abaisser les tensions avec
un très bon rendement. A cause de ces facilités de transformation, on utilise, pour transporter
et distribuer l’énergie électrique, des courants alternatifs triphasés de haute et moyenne et
moyenne tension qui peuvent être adaptés aux besoins des usagés : industries lourdes, ateliers,
résidences, etc. Deuxièmement, les alternateurs, qui sont des générateurs de courant alternatif,
peuvent produire directement des tensions plus élevées que celles pouvant être produites les
générateurs de courant continu (dynamos).
De manière générale, on entend par alimentations électroniques, les montages permettant de
fournir des tensions et courants continus (de valeur moyenne non nulle), ou des tensions et

Cours d’électronique 2 : Les fonctions électroniques
16/11/2014
Mazoughou Goépogui 669 35 43 10 / 655 34 42 38 /
2
courants alternatifs ; à partir de sources d’énergies elles mêmes continues ou alternatives. C’est
le domaine de la conversion d’énergie. Il existe quatre (4) types de convertisseurs dont les
principes se retrouvent dans les alimentations.
1. Convertisseurs AC → DC (redresseurs simples ou commandés) :
A partir d’une tension alternative, en générale sinusoïdale (secteur), on obtient une tension
redressée de valeur moyenne non nulle. Les applications à faible puissance sont :
alimentation à tension et courant continu ;
alimentation de petits moteurs à courant continu ;
redresseur pour accumulateur ;
etc.
Une partie du courant alternatif est transformée en courant continu à l’aide de redresseurs qui
sont des dispositifs ne laissant passer le courant que dans un seul sens. Le courant continu est
indispensable dans de nombreuses applications :
l’alimentation de dispositifs électroniques tels que les amplificateurs, les
oscillateurs, les récepteurs de radio et de téléviseurs, etc.
la charge des accumulateurs ;
l’électrolyse utilisée dans l’électrochimie, l’électrométallurgie (fabrication de
l’aluminium, affinage des métaux, chromage, nickelage, galvanoplastie) ;
l’obtention de champs magnétiques constants avec des électroaimants (grues
électromagnétiques, etc.)
Le courant continu est également utilisé pour l’alimentation de moteurs à vitesse variable, de
moteurs à traction (trains, métro). Il peut être aussi employé pour le transport de l’énergie sur
de grandes distances, pour le transport dans des câbles sous-marins et souterrains et pour
accorder des réseaux électriques dont les fréquences ne sont pas identiques.
2. Convertisseurs DC → DC (hacheurs) :
A partir d’une tension continue (de valeur moyenne non nulle), on obtient une tension et un
courant également continus (de valeur moyenne non nulle). Les applications à faible puissance
sont :
alimentation à découpage ;
alimentation pour petits moteurs à courant continu ;
alimentation de solénoïdes (actionneurs linéaires, moteurs pas à pas) ;
etc.
3. Convertisseurs AC → AC (gradateurs, cycloconvertisseurs) :
A partir d’une tension alternative, en générale sinusoïdale (secteur), on obtient une autre tension
alternative de valeur efficace variable, à fréquence fixe (gradateur) ou à fréquence variable
(cycloconvertisseurs). Les applications à faible puissance sont :
prérégulation des alimentations continues ;

Cours d’électronique 2 : Les fonctions électroniques
16/11/2014
Mazoughou Goépogui 669 35 43 10 / 655 34 42 38 /
3
alimentation des moteurs alternatifs de puissance réduite ;
variation d’éclairage ;
etc.
4. Convertisseurs DC → AC (onduleurs assistés ou autonomes) :
A partir d’une tension continue (secteur redressé et filtré, ou batterie), on obtient une tension
alternative impulsionnelle ou quasi sinusoïdale. Les applications à faible puissance sont :
certains éléments des alimentations à découpage ;
les petits groupes de secours ;
alimentation de moteurs alternatifs à fréquence variable ;
etc.
1.1.1. Rappel de définitions.
Avant de commencer l’étude des éléments d’une source d’alimentation continue, rappelons
brièvement les définitions et relations essentielles concernant les sources continues et
alternatives.
a) Courant continu.
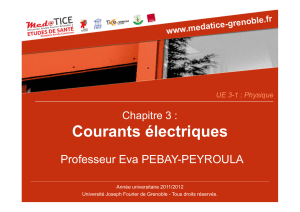
C’est un courant unidirectionnel et de valeur constante. Il existe également des courant
unidirectionnels dont les valeurs varient périodiquement : courant pulsé ou ondulé, courant en
dent de scie (fig.5).
a) courant continu b) courant périodique pulsé c) courant en dent de scie
Fig.5. Courants unidirectionnels.
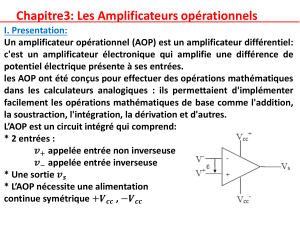
b) Courant alternatif.
Le courant alternatif est un courant qui change de sens périodiquement et dont la valeur
moyenne est nulle (fig.6). Les réseaux de distribution de l’énergie électrique alimentés par les
alternateurs ainsi que les groupes électrogènes fournissent un courant alternatif sinusoïdal.
La fréquence (f) est le nombre de fois que le courant reprend le même sens pendant une seconde,
elle est exprimée en Hertz (Hz). La fréquence standard des réseaux de distribution nord-
américains est de 60Hz (avec une tension de 110V) ; alors que celle des réseaux de distribution
européens est de 50Hz (avec une tension de 220V).
La période est le temps constant qui s’écoule entre deux reprises de même sens.
i
i
i
t
t
t

Cours d’électronique 2 : Les fonctions électroniques
16/11/2014
Mazoughou Goépogui 669 35 43 10 / 655 34 42 38 /
4
f = 1/T
Une alternance est une demi-période comprise entre deux changements de sens consécutifs.
a) Courant alternatif sinusoïdal b) Courant alternatif rectangulaire
Fig.6. Courants alternatifs.
c) Valeur instantanée.
C’est la valeur à un instant t donné. Pour une tension ou un courant alternatif sinusoïdal donné
la valeur instantanée est donnée par la relation ci-dessous.
tUu
sin
max
tIi
sin
max
Avec ω = 2πf (en radiant par seconde : rad/s)
u et i représentent les valeurs instantanées ; Umax et Imax les valeurs maximales et ω la
pulsation.
d) Valeur efficace.
C’est la valeur que devrait avoir une tension ou un courant continu constant pour produire, dans
la même charge résistive et pendant le même temps, la même énergie calorifique que la tension
ou le courant alternatif.
Dans le cas d’un courant sinusoïdal, nous avons, pour une période :
TdtRiW
0
2
Dans le cas d’un courant continu, nous avons : W = RI2T ;
De sorte que
2
max
I
II eff
De même
2
max
U
UU eff
Les valeurs des tensions et des courants alternatifs sont données généralement en valeurs
efficaces et sont mesurées à l’aide d’un appareil de mesure à courant alternatif.
i
t
T/2
T
Imax
-Imax
i
t
T/2
T
Imax
-Imax

Cours d’électronique 2 : Les fonctions électroniques
16/11/2014
Mazoughou Goépogui 669 35 43 10 / 655 34 42 38 /
5
d) Valeur moyenne.
La valeur moyenne d’un courant variable est la valeur arithmétique moyenne de toutes les
valeurs prises par le courant pendant une période.
2/
0
max
2
)(
2T
moy I
dtti
T
I
max
2U
Umoy
Avec T = 2π
e) Facteur de forme.
C’est le rapport de la valeur efficace à la valeur moyenne.
moy
eff
I
I
F
22
F
Pour un courant alternatif sinusoïdal.
La tension efficace d’ondulation a pour expression :
22
.. moyeffondeff UUU
Le taux d’ondulation ou coefficient de ronflement a pour expression :
100(%) .
moy
ondeff
U
U
r
f) Facteur d’utilisation d’un transformateur (F.U.T).
Lorsqu’un transformateur est utilisé pour alimenter un redresseur, il faut tenir compte de son
facteur d’utilisation. Dans les transformateurs d’alimentation, le courant unidirectionnel pulsé
qui circule dans la charge et dans l’enroulement secondaire comprend une composante continue
et des composantes alternatives appelées harmoniques. Ces harmoniques ne sont pas utilisées à
la sortie du redresseur. Ils contribuent, par contre, à la saturation du noyau magnétique et à
l’échauffement du transformateur, ce qui en diminue l’efficacité.
Le F.U.T est défini, pour l’enroulement secondaire, par la relation :
)(
..
.
.
VAPP
SecUF
SN
Scc
Pour l’enroulement primaire on à :
)(
Pr..
.
.
VAPP
iUF
PN
Scc
La valeur moyenne du facteur d’utilisation du transformateur à pour expression :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
1
/
205
100%