Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie énergétique B 1 280 − 1
B 1 280 11 - 1988
Optimisation des processus
énergétiques : concepts
par Jean-Claude DUCROCQ
Ingénieur Civil des Mines
Ingénieur-Chercheur à la Direction des Études et Recherches
de Électricité de France (EDF)
et Dominique SAUMON
Chef du Département PROVAL (Prospectives, évaluation et valorisation)
du Service Information, prospectives et normalisation de Électricité de France (EDF)
’article « Optimisation des processus énergétiques » se compose de trois
articles :
— Concepts [B 1 280] ;
— Applications [B 1 281] ;
— Gestion optimale [B 1 282].
1. Nécessité de l’optimisation technico-économique........................ B 1 280 - 2
1.1 Illustration sur un cas particulier................................................................ — 2
1.2 Variations des prix relatifs des énergies
et indisponibilités des équipements .......................................................... — 2
1.3 Substitution possible des différentes sources d’énergie ......................... — 2
2. Différents niveaux de l’optimisation.................................................. — 4
2.1 Choix des solutions ..................................................................................... — 4
2.2 Dimensionnement de la solution retenue ................................................. — 4
2.3 Exploitation optimale des équipements.................................................... — 5
3. Formalisation générale des problèmes d’optimisation................. — 5
3.1 Variables et relations entre elles ................................................................ — 5
3.2 Principales questions .................................................................................. — 5
3.2.1 Déterminer le coût d’exploitation...................................................... — 5
3.2.2 Décider un investissement................................................................. — 6
3.2.3 Concevoir les appareils...................................................................... — 6
3.2.4 Définir un programme d’investissements........................................ — 6
3.3 Traitement pratique de ces questions........................................................ — 7
4. Outils mathématiques disponibles ..................................................... — 7
4.1 Programmation linéaire ou mixte (optimisation linéaire)........................ — 7
4.2 Simulation et optimisation non linéaires .................................................. — 7
4.2.1 Simulation non linéaire...................................................................... — 7
4.2.2 Optimisation non linéaire .................................................................. — 8
4.3 Rapide panorama des autres outils mathématiques disponibles ........... — 8
5. Conclusion ................................................................................................. — 8
Références bibliographiques ......................................................................... — 9
L

OPTIMISATION DES PROCESSUS ÉNERGÉTIQUES : CONCEPTS __________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
B 1 280 − 2© Techniques de l’Ingénieur, traité Génie énergétique
1. Nécessité de l’optimisation
technico-économique
1.1 Illustration sur un cas particulier
Le choix, la conception et l’exploitation d’équipements ou de
systèmes d’équipements énergétiques se présentent rarement sous
l’angle d’une solution unique. En d’autres termes, les décisions
d’investissement, le dimensionnement des appareils et leur utili-
sation se posent en terme de recherche d’une solution optimale
vis-à-vis de critères choisis par l’ingénieur ayant en charge ces
problèmes.
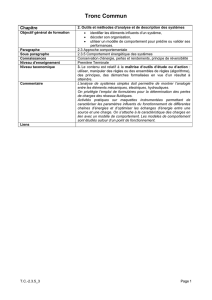
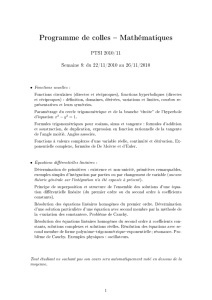
Cette idée générale est illustrée par l’exemple du dimensionne-
ment optimal d’un système pompe à chaleur-compression
mécanique de vapeur d’eau (figure 1).
Considérons, en effet, le cas d’une machine à papier dans une
papeterie. Les cylindres de ce séchoir – une machine à papier est
en effet un séchoir multicylindrique – sont alimentés en vapeur à
différents niveaux thermiques ; on retient les valeurs suivantes :
pression de 2 bar et température de 120 oC. Les buées provenant
du séchage de la feuille de papier constituent un effluent à bas
niveau thermique (65
oC) non valorisé. On envisage donc de
récupérer la chaleur de ces buées à l’évaporateur d’une pompe à
chaleur (PAC) pour vaporiser l’eau condensée sortant des cylindres
sécheurs. La vapeur ainsi produite (1 bar-100 oC) ne présentant pas
le niveau thermique requis pour son utilisation dans les cylindres,
une compression de la vapeur (CMV) est donc nécessaire.
Si l’on se fixe les températures d’évaporation et de condensation
de la PAC ainsi que les différents pincements au niveau des échan-
geurs, il n’y a qu’un seul dimensionnement possible. La solution est
techniquement faisable, mais il est probable que d’autres valeurs
de ces températures et pincements pourraient conduire à une
meilleure solution au regard d’un critère donné (consommation élec-
trique du système par tonne de vapeur produite, coût d’exploitation
annuel, ce dernier pouvant incorporer les charges d’investissement,
etc.). Ainsi, l’élévation de la température de condensation conduit
à augmenter la puissance de la PAC et à diminuer celle de la CMV.
La diminution des pincements permet une meilleure récupération
énergétique, mais pénalise les surfaces des échangeurs, et par là
même le coût d’investissement du projet.
En résumé, plusieurs solutions sont possibles, et accroître le
rendement énergétique global d’une installation ne conduit pas
nécessairement à la solution optimale sur le plan économique.
Cet exemple permet de montrer :
— la nécessité de poser le problème de dimensionnement en
terme d’optimisation ;
— la nécessité de choisir un critère d’optimisation au regard de
l’objectif poursuivi ; ce critère sera généralement de nature écono-
mique, incluant les charges d’investissement et l’ensemble des coûts
d’exploitation.
L’optimisation de la conception ou de l’exploitation d’un système
énergétique n’est cependant pas régie seulement par des paramètres
techniques comme dans l’exemple précédent. Les variations des prix
relatifs des énergies, les indisponibilités des équipements ou la subs-
titution possible des sources d’énergie conduisent eux aussi à des
optimisations.
1.2 Variations des prix relatifs
des énergies et indisponibilités
des équipements
Les prix relatifs des différentes énergies varient de façon souvent
importante et rapide au cours du temps (par exemple, le cours du
fuel lourd). Donc, aussi bien l’industriel utilisateur que les produc-
teurs-distributeurs doivent tenir compte de ces possibilités de varia-
tion, quand ils s’équipent ou quand ils établissent leur programme
d’exploitation et décident leur approvisionnement.
Un autre élément peut avoir une assez grande importance en
pratique : le risque d’indisponibilité des équipements. Même si
celui-ci est faible pour chaque appareil constituant l’équipement, il
faut en général en tenir compte explicitement. En effet, la plupart
des systèmes doivent être conçus de façon à ce que le risque de
ne pas fournir le service demandé soit réduit au maximum : l’inter-
ruption de la fourniture d’énergie cause trop de nuisances aux
activités desservies.
1.3 Substitution possible
des différentes sources d’énergie
La substitution possible des différentes énergies constitue un
degré de liberté important dans la conception et l’exploitation des
installations énergétiques. Non seulement la vapeur et l’air chaud
peuvent être produits à partir du fuel, du gaz, du charbon, de l’élec-
tricité, mais les vecteurs énergétiques eux-mêmes peuvent souvent
être l’objet d’un choix. L’opération de concentration peut ainsi,
suivant les cas, être réalisée à l’aide de la vapeur (concentrateur
multiples effets), de rayonnement (séchage par micro-ondes sous
vide) ou par l’effet de la pression (procédés de séparation par osmose
inverse).
Cet exemple de substitution des énergies, relatif au choix de la
technique à utiliser, trouve son équivalent dans le domaine de
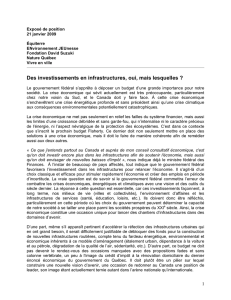
l’exploitation des énergies substituables. Ainsi, dans le cas du
système chaleur-force de la figure 2, l’exploitant aura intérêt, en
fonction des prix relatifs de l’électricité et du combustible sous
chaudière, à autoproduire thermiquement l’énergie électrique ou, au
contraire, à l’acheter au réseau et à détendre statiquement la vapeur.
La substituabilité des énergies concerne donc tout autant le choix
optimal des investissements que l’optimisation de leur gestion.
La complexité de la gestion d’un système tel que celui de la
figure 2, ou le dimensionnement optimal des équipements de la
figure 1, nécessitent des outils d’étude appropriés à ces différents
problèmes [1]. Cet article est donc articulé autour des thèmes
suivants :
— les différents niveaux et problèmes d’optimisation ;
— la formalisation générale des problèmes d’optimisation et les
critères utilisés ;
— les outils mathématiques disponibles.

__________________________________________________________________________________ OPTIMISATION DES PROCESSUS ÉNERGÉTIQUES : CONCEPTS
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie énergétique B 1 280 − 3
Figure 1 – Système pompe à chaleur (PAC) – compression mécanique de vapeur (CMV) en récupération
sur les buées sortant d’un cylindre sécheur d’une machine à papier (les paramètres , b et X sont définis au paragraphe 3.1)
,

OPTIMISATION DES PROCESSUS ÉNERGÉTIQUES : CONCEPTS __________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
B 1 280 − 4© Techniques de l’Ingénieur, traité Génie énergétique
2. Différents niveaux
de l’optimisation
L’optimisation des processus énergétiques peut être envisagée à
trois niveaux différents :
— le choix des solutions ;
— le dimensionnement (la conception) de la solution retenue ;
— l’exploitation des équipements.
2.1 Choix des solutions
Le choix de la meilleure solution se pose en des termes légèrement
différents suivant la nature de l’entreprise concernée.
Pour les producteurs-distributeurs d’énergie, il s’agit de minimiser
un coût constitué en grandes parties par l’achat des matières
premières et l’amortissement des équipements. Pour le producteur
d’électricité, il s’agira ainsi de déterminer la meilleure répartition
entre les différentes filières de production (nucléaire, thermique
charbon ou fuel, hydraulique), ainsi que le meilleur tracé des dif-
férents réseaux de distribution (haute, moyenne et basse tension).
Pour une industrie de process (chimie, raffinage, sidérurgie, etc.),
il s’agit souvent de choisir, entre différents équipements susceptibles
de rendre le même service (thermocompression et compression
mécanique de vapeur, par exemple), celui dont l’insertion au sein
d’un réseau énergétique conduit au moindre coût. Le choix peut
néanmoins, comme pour les distributeurs d’énergie, se poser en
amont en terme de choix entre plusieurs filières de fabrication. Ce
serait par exemple le choix des séquences de séparation pour un
raffineur : le mélange A + B + C + D doit-il être séparé en A + B et
C + D, puis A, B, C, D, ou au contraire en A et B + C + D, ce dernier
mélange étant ensuite fractionné en B + C et D par exemple ? Ces
différentes solutions conduisent à des coûts énergétiques et d’inves-
tissement différents.
2.2 Dimensionnement
de la solution retenue
Une filière de production ou un équipement ayant été choisi lors
de la phase précédente, il convient ensuite d’en assurer la conception
optimale au regard d’un objectif (d’un critère). Ceci a été illustré, dans
le cas d’un équipement isolé, par l’exemple de la figure 1. Une
mention spéciale doit être faite pour les équipements s’insérant dans
un système énergétique complexe.
Pour reprendre l’exemple de la figure 1, si la vapeur consommée
par les cylindres sécheurs est fournie par le système de transfor-
mation de l’énergie de la figure 2, il convient de procéder en deux
temps.
■Il faut étudier l’intéraction du système PAC + CMV avec le système
énergétique de la figure 2 de façon à établir l’intérêt économique du
projet et à confirmer le choix de cette technique. Le système
Figure 2 – Exemple de système chaleur-force complexe

__________________________________________________________________________________ OPTIMISATION DES PROCESSUS ÉNERGÉTIQUES : CONCEPTS
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie énergétique B 1 280 − 5
PAC + CMV est alors caractérisé par quelques ratios essentiels
(ordres de grandeur de la consommation électrique, de la production
de vapeur, du coût d’investissement), éventuellement paramétrés
pour tenir compte des degrés de liberté existant dans la conception
optimale du système PAC + CMV qui sera réalisée à l’étape
ultérieure. Cette phase s’apparente au choix de la solution, mais peut
également fournir l’ordre de grandeur de la taille optimale de
l’investissement.
■L’intérêt économique et la « taille » de la solution ayant été établis
en tenant compte de son intégration dans le système énergétique, il
est alors possible d’en envisager la conception optimale en se foca-
lisant sur le système PAC + CMV.
En d’autres termes, le choix et la conception optimale du projet
sont deux facettes d’un même problème qui ont été découplées
moyennant un transfert d’informations de l’une à l’autre, et
d’éventuelles itérations. Le traitement simultané des deux aspects
du problème est théoriquement possible ; ce sont des considérations
pratiques de limitation des outils informatiques disponibles et de
simplification des analyses qui conduisent à procéder ainsi.
2.3 Exploitation optimale
des équipements
L’exploitation optimale des équipements peut recouvrir deux
aspects différents :
—la gestion prévisionnelle, qui a alors pour objectif de définir le
planning d’exploitation conduisant à la minimisation des coûts
d’exploitation, en particulier énergétiques, sur un laps de temps
pouvant aller de la journée à plusieurs années (cas de la gestion du
parc de centrales nucléaires) ;
—la gestion en temps réel des installations.
3. Formalisation générale
des problèmes
d’optimisation
3.1 Variables et relations entre elles
On comprendra mieux comment se situent les trois niveaux de
décision cités au paragraphe 2 si l’on définit plus précisément les
variables qui interviennent le plus fréquemment dans les optimi-
sations de systèmes énergétiques, ainsi que les principales relations
entre elles.
■Ce qu’il faut déterminer :
X caractéristiques du matériel (surfaces d’échange, diamètres
de tuyauteries, etc.) ;
ϕ
flux de matières et transferts d’énergie ;
θ
autres paramètres physiques descriptifs du processus (tempé-
ratures, pressions, etc.) ;
e consommations du processus (apports extérieurs d’énergies
primaires).
■Ce que l’on doit savoir sur l’environnement du système :
b besoins que le processus doit desservir, c’est-à-dire l’énergie
utile demandée (chaleur dans des conditions données, force motrice,
etc.) ;
p prix d’achat des énergies primaires consommées.
■Ce qui relie ces éléments entre eux : beaucoup de processus
peuvent être pratiquement représentés par deux familles de
relations.
Les premières sont les relations entre les caractéristiques propres
au matériel et les paramètres descriptifs du processus de transfor-
mation. Elles expriment la faisabilité des différentes opérations
élémentaires qui constituent le processus ; elles peuvent être assez
nombreuses et être écrites de façon très générale si l’on fait
abstraction des problèmes particuliers que poseraient des stockages
de produits intermédiaires ou encore une analyse très fine des
régimes transitoires : G (X,
ϕ
,
θ
) = 0 (1)
Les secondes expriment la conservation de la matière et de
l’énergie. Elles sont linéaires (simples bilans physiques) et peuvent
être aussi écrites de façon très générale :
B ·
ϕ
+ e = b(2)
B est la matrice de l’opérateur qui résume ses bilans physiques
pour le problème d’optimisation technico-économique. Elle reflète
la topologie du système énergétique étudié. La prise en compte des
possibilités d’indisponibilités de certains matériels peut rendre un
peu complexe la formulation des bilans. Il faut alors écrire le bilan
emploi-ressources dans chacune des situations où certains matériels
sont indisponibles et pour lesquelles on exige que tout ou partie des
besoins, représentés par le vecteur b, soient desservis.
■Le facteur temps : les relations précédentes doivent être vérifiées
à tout instant. Aussi,
ϕ
,
θ
et e doivent être considérés comme des
fonctions du temps, comme le sont b et p paramètres du problème.
Bien sûr, si ces paramètres ne sont que peu destinés à varier, on
peut se contenter d’analyser un seul régime de fonctionnement des
appareils.
Mais il faut souvent tenir compte de ce que certaines énergies,
le gaz par exemple et surtout l’électricité, présentent une structure
tarifaire avec prime fixe et coûts de l’énergie pouvant avoir dif-
férentes valeurs au cours de l’année. Ces variations relatives des prix
des énergies au cours d’une année d’exploitation peuvent alors
justifier des solutions modulant l’appel à plusieurs énergies. C’est
notamment le cas de la bi-énergie combustible fossile-électricité,
appliquée à la production de vapeur : cette dernière est réalisée à
partir des combustibles fossiles pendant l’hiver tarifaire EDF, et par
utilisation d’une chaudière électrique pendant les périodes ou le
kilowattheure du réseau est compétitif pour cette utilisation (été
tarifaire ). Dans d’autres cas, c’est la modulation des besoins qui
impose sa loi au fonctionnement du système fournisseur d’énergie.
3.2 Principales questions
Si l’on veut caractériser complètement les coûts économiques
d’une configuration d’un système d’équipements définie par un
vecteur X, il faut ensuite se référer à deux éléments :
— un coût fixe d’investissement, que l’on notera A (X) ;
— un coût variable d’exploitation, qui résulte principalement de
l’achat des énergies fournies au processus et qu’il faut rendre le
plus faible possible : c (t) = < e (t) · p (t) >
3.2.1 Déterminer le coût d’exploitation
Supposons X connu ; les valeurs qui caractérisent l’exploitation
du processus pourraient être définies en résolvant, pour tout
instant t, le problème :
Mine,
ϕ
,
θ
|c (t) = < e (t) · p (t) > |
G (X,
ϕ
,
θ
) = 0 [formule (1)]
B ·
ϕ
+ e = b[formule (2)]
ce qui fournit e*(t),
ϕ
*(t) et
θ
*(t) qui caractérisent l’exploitation
optimale du processus. Ces résultats, et donc aussi le coût d’exploi-
tation obtenu, sont des fonctions de l’équipement :
<e*(t) · p (t)> = c*(X, t )
 6
7
8
9
6
7
8
9
1
/
9
100%