Examen Robotique Maraîchage Oz 440 : Analyse et Asservissement
Telechargé par
ounaies mohamed

1
Robot de maraichage Oz 440
CCP MP
Question 1. À l’aide du diagramme de définition de blocs disponible (figure 1, page 2),
compléter sur le document réponse DR1 le diagramme correspondant à la chaîne d’énergie
de l’ensemble groupe propulsion droit du robot.
Question 2. Donner l’expression de l’énergie cinétique du robot avec l’outil de binage et la
charge tractée dans son mouvement par rapport au sol.
On néglige l’inertie des roues de la remorque.
L’énergie cinétique de l’ensemble Σ : (robot + charge tractée + outil de binage) dans son
mouvement par rapport au sol est donnée par :
2 2 2
1 1 1
( / 0) ( ) 4. 4.
2 2 2
c t r r m m
E M m m V J J
ω ω
Σ = + + + +
Question 3. En déduire l’expression de l’inertie équivalente J
eq
ramenée sur l’arbre moteur.
D’après l’énoncé on a
r
m
ω
ρ
ω
=
et avec la condition de roulement sans glissement des roues sur
le sol on peut écrire : V = r ω
r
On en déduit :
( )
2
2 2
2 2 2
1 1 1
( / 0) ( ).( ) 4. 4.
2 2 2
1
( / 0) ( ).( ) 4. 4.
2
c t m r m m m
c t r m m
E M m m r J J
E M m m r J J
ρω ρω ω
ρ ρ ω
Σ = + + + +
Σ = + + + +
L’inertie équivalente ramenée sur l’axe d’un des moteurs est donc :
2 2
1( ).( )
4
eq t r m
J M m m r J J
ρ ρ
= + + + +
Question 4. Calculer la valeur de J
eq
en utilisant les données fournies dans le diagramme de
définition de blocs (figure 1, page 2).
2
2 2 1 4 4 2
1 1 1
(330).(13,25.10 . ) 0,38.10 5.10 11,4.10 .
4 46 46
eq
J kg m
− − − −
= + + =
Alimenter
Stocker
Convertir
Moteur
Transmettre
Réducteur
Convertir
Moteur
Transmettre
Réducteur
Batterie Carte de puissance
Roue avant droite dans
une position
Roue avant droite en position
Roue avant gauche
dans une position
Roue avant gauche
en position
Axe réducteur
gauche
Axe réducteur
droit

2
Question 5. Déterminer l’expression littérale des puissances des actions mécaniques
extérieures.
On fait l’hypothèse que l’outil de binage n’est pas en contact avec le sol (rien n’est mentionné
dans l’énoncé concernant le contact sol / outil de binage)
On néglige la résistance au roulement des roues sur le sol (pas très compatible avec l’exigence
Id 141 …. sol meuble ….) mais rien n’est indiqué dans l’énoncé concernant la résistance au
roulement.
On isole l’ensemble Σ et on fait le bilan des actions mécaniques extérieures.
- Action de la pesanteur sur l’ensemble
- Action du sol sur les 4 roues motrices et sur les roues de la remorque.
/
( ) sin
pes sol t
P M m m gV
α
→Σ
= − + +
/
0
sol sol
P
→Σ
=
(Condition de roulement sans glissement des roues sur le sol)
Question 6. Déterminer l’expression de la puissance d’inter-effort en fonction de Cm, η et
ω
m
.
Toutes les liaisons sont considérées comme énergétiquement parfaites sauf celles au niveau
du réducteur.
La puissance des inter-efforts est donnée par :
( ) 4 4(1 )
( ) 4
i m m m m
i m m
P C C
P C
ω η ω
η ω
Σ = − −
Σ =
Question 7. Appliquer le théorème de l’énergie cinétique et en déduire l’expression du couple
moteur Cm nécessaire pour déplacer le robot en fonction de la pente du terrain, de
l’accélération du robot et en fonction des caractéristiques définies dans le diagramme de
définition de blocs (figure 1,page 2) ou dans la partie notations (page 4).
On se place dans la phase la plus défavorable c'est-à-dire juste à la fin de la phase
d’accélération.
Remarque : La prise en compte du rendement (grandeur associée au régime permanent) durant
la phase transitoire me perturbe … mais je réponds aux questions de l’énoncé.
On applique le théorème de l’énergie cinétique à l’ensemble Σ dans son mouvement par
rapport au sol.
/
( / ) ( ) 4 ( ) sin 4
4 ( )sin
4 ( ) sin 4 4
4 ( )sin
4
cext S Sol i eq m m t m m
eq m t
eq m m t m m m m
eq t
m
d E sol P P S J M m m gV C
dt
J M m m gr
J M m m gr C C
a
J M m m gr
r
C
ω ω α η ω
ω α ρ
ω ω ρω α η ω η
α ρ
ρη
→
= Σ +Σ = − + + +
+ + +
= − + + + =
+ + +
=
ɺ
ɺ
ɺ

3
Question 8. Calculer la valeur du couple C
m
et conclure vis-à-vis des exigences du cahier des
charges.
4 2
2
4.11,4.10 .0,2.46 330.10.13,25.10
4 ( ) 13,25.10 46 0,42
4 4.0,63
eq t
m
a
J M m m gr
r
C Nm
ρ
ρη
− −
−
+ + + +
= = =
Le couple maximal d’un des moteurs est de 0.8Nm.
Le moteur semble correctement dimensionné (mais on n’a pas tenu compte de l’action du sol
sur l’outil de binage et de la résistance au roulement)
Question 9. Identifier les expressions des fonctions de transfert
( )
( )
( )
g
gg
p
H p
U p
Ω
=
et
( )
( )
( )
d
dd
p
H p
U p
Ω
=
. Donner les valeurs numériques des coefficients de ces fonctions de
transfert. En déduire l’expression de la fonction de transfert
1
( )
( )
( )
p
H p
U p
∆Ω
=∆
Sur la figure 6, les courbes représentant ω
g
(t) et ω
d
(t) présentent les caractéristiques suivantes
pour une entrée en échelon :
- Pas de dépassement
- Valeur en régime permanent constante
- Pente de la tangente à l’origine non nulle
On peut modéliser les fonctions de transfert H
g
(p) et H
d
(p) par des fonctions de transfert du
1
er
ordre de la forme :
1
K
p
τ
+
H
g
(p) H
d
(p)
Valeur de l’échelon : 15V
Valeur de ω
g
en régime permanent : 98 rad.s
-1
On en déduit
1 1
98
6,5 . .
15
g
K rad s V
−
= =
Constante de temps : 0.3s
( )
6,5
( )
( ) 1 0,3
g
gg
p
H p
U p p
Ω
= = +
Valeur de l’échelon : 10V
Valeur de ω
g
en régime permanent : 65 rad.s
-1
On en déduit
1 1
65
6,5 . .
10
g
K rad s V
−
= =
Constante de temps : 0.3s
( )
6,5
( )
( ) 1 0,3
d
dd
p
H p
U p p
Ω
= = +
On peut en déduire :
1
1
6,5 6,5
( ) ( )
( ) ( ) 1 0,3 1 0,3
( ) ( ) ( ) ( ) ( )
6,5
( ) 1 0,3
d g
d g
d g d g
U p U p
p p p p
H p U p U p U p U p
H p p
−
Ω −Ω + +
= =
− −
=+

4
Question 10. Donner la condition vectorielle de roulement sans glissement en I
3
. À partir de
cette condition, déterminer l’équation scalaire liant V,
d
dt
ϕ
et ω
d
. Donner ensuite la condition
de roulement sans glissement en I
4
puis, à partir de cette condition, déterminer l’équation
scalaire liant V,
d
dt
ϕ
et ω
g
.
En I
3
la condition de roulement sans glissement entre la roue3 et le sol s’écrit :
(
)
3 3
3/ 0 ( 3/ ). 0
V I roue sol et roue sol y
∈ = Ω ≠
Que l’on peut aussi écrire :
(
)
3 3
3/0 0 ( 3/ 0). 0
V I et roue y
∈ = Ω ≠
On en déduit :
(
)
(
)
(
)
( ) ( ) ( )
3 3 3
3 3 3 1 1
3
3
1 1 1
1 1 1
3/ 0 0 3/1 1/ 0
3/ 0 0 0 3/1 (3/1) 0 0 1/ 0 (1/ 0) 0
0 0 ( ) ( )
0
d
d
V I V I V I
V I V I V I
y rz Vx z ey hz rz
r x Vx e x
ω ϕ
ω ϕ
∈ = = ∈ + ∈
∈ = = ∈ +Ω ∧ + ∈ +Ω ∧
= + ∧ − + + + − − −
− + + =
ɺ
ɺ
En projection sur
1
x
, on obtient :
0
d
r V e
ω ϕ
− + + =
ɺ
En I
4
la condition de roulement sans glissement entre la roue4 et le sol s’écrit :
(
)
4 4
4/0 0 (4/0). 0
V I et y
∈ = Ω ≠
On en déduit :
(
)
(
)
(
)
( ) ( ) ( )
4 4 4
4 4 4 1 1
4 4
1 1 1
1 1 1
4 / 0 0 4 /1 1/ 0
4 / 0 0 0 4 /1 (4 /1) 0 0 1/ 0 (1/ 0) 0
0 0 ( ) ( )
0
g
g
V I V I V I
V I V I V I
y rz Vx z ey hz rz
r x Vx e x
ω ϕ
ω ϕ
∈ = = ∈ + ∈
∈ = = ∈ +Ω ∧ + ∈ +Ω ∧
= + ∧ − + + + − −
− + − =
ɺ
ɺ
En projection sur
1
x
, on obtient : 0
d
r V e
ω ϕ
− + − =
ɺ
Question 11.
À partir des équations précédentes, déterminer la relation liant
Δω
et
d
dt
ϕ
, puis
la fonction de transfert
21
( )
( )
( )
p
H p
p
Φ
=∆Ω
où
Φ
(p) représente la transformée de Laplace de
l’angle
φ
(t) (on supposera par ailleurs la condition initiale nulle
φ
(0) = 0).
À partir de la question précédente, on peut écrire :
d
V e
r
ϕ
ω
+
=
ɺ
et
g
V e
r
ϕ
ω
−
=
ɺ
On en déduit :
2 2
d g
V e V e e e d
r r r r dt
ϕ ϕ ϕ
ω ω ω ω ϕ
+ −
∆ = − = − ∆ = =
ɺ ɺ ɺ
ɺ
21
( )
( )
( ) 2
p r
H p
p ep
Φ
= =
∆Ω
(Condition initiale nulle)

5
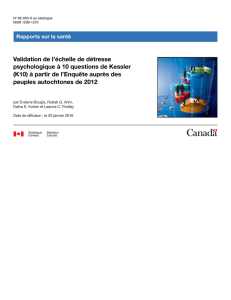
Question 12. Faire un schéma puis déterminer la relation liant dy(t), dx(t) et l’angle φ(t).
En déduire l’expression de
( )
( )
dy t
y t
dt
=
ɺ
en fonction de V et de φ(t) en linéarisant l’expression
à l’ordre 1 dans l’hypothèse où l’angle φ(t) reste petit.
( ) ( ) ( )
tan ( ) tan ( ) ( ) ' ( ) .
( ) ( ) ( )
dy t dy t dy t dt
t si est petit t t d où t
dx t dx t dt dx t
ϕ ϕ ϕ ϕ ϕ
= = = =
( ) ( )
( ) ( ) ( ) ( ) ( )
dy t dx t
t y t t x t t V
dt dt
ϕ ϕ ϕ
= = =
ɺ ɺ
Question 13. En déduire l’expression de la fonction de transfert
22
( )
( )
( )
Y p
H p
p
=Φ
où Y(p)
représente la transformée de Laplace du déplacement latéral du robot y(t) (on supposera
toujours, par ailleurs, la condition initiale nulle y(0) = 0). En déduire la fonction de transfert
H
2
(p) du suivi de trajectoire à partir des résultats trouvés précédemment.
D’après la question précédente :
22
( )
( ) ( )
Y p V
H p
p p
= =
Φ
(condition initiale nulle)
On en déduit :
2 21 22
2
( ) ( ) ( ) 2 2
r V rV
H p H p H p
ep p ep
= = =
Question 14. Quelle est la valeur de la tension u
capt-0
à 0,1 V près ? Quelle est la tension
u
capt_droit
(t) lorsque le robot est décalé de y = 5 cm entre ces 2 rangs de culture ? Quelle est la
tension u
capt_gauche
(t) à ce même instant ?
Si le robot est centré
D’après la courbe de la figure 10, on en déduit
U
cap-0
=1,1V
Si le robot est décalé vers la gauche de 5 cm (y(t)
positif par rapport à la ligne moyenne)
D’après la courbe de la figure 10, U
cap-droit
=0.9V et
U
cap-gauche
=1.3V
Question 15. En déduire le gain K
c
du bloc « capteur de distance » autour de ce point de
fonctionnement et préciser son unité.
Autour de ce point de fonctionnement
1
2
0.4
8 .
5.10
c
K V m
−
−
= =
dy(t)
dx(t)
φ (t)
70 cm
20 cm
25 cm
25 cm
70 cm
30 cm
20 cm
20 cm
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%