1
FACULTE POLYDISCIPLINAIRE A LARACHE
Licence Fondamentale
Sciences :………………………………..
Parcours : ……………………………….
Projet de Fin d’Etudes
Navigation et évitement d’obstacle
D’une voiture autonome
»
Réalisé Par :
Nom & Prénom candidat 1 Nom & Prénom candidat 2
ILYAS ACHAMROUAN mohamed el annaz
Smp 0064/16 smp00644/14
Encadré Par :
Pr. Larbi SETTI
ANNEE UNIVERSITAIRE
2019-2020

2
Sommaire
:
Chapitre I :
Table matière :
1. Introduction générale …………………………………..5
2. Présentation du mémoire …………………………………5
3. Plateforme utilisée………………………………………6
a. Introduction ……………………………………………………6
b. Hardware ……………………………………………………...6
c. Plateforme mobile ………………………………………………..6
4. Arduino : ………………………………………………………..7
1.1.1. Introduction ………………………………………………….7
1.1.2. Le Principe de fonctionnement ……………………………………8
1.1.3. Logiciel……………………………………………………..8
1.1.4. L’interface …………………………………………………..8
1.1.5. Les boutons ………………………………………………….10
1.1.6. Le langage Arduino…………………………………………..10
1.1.7. Le matériel : ………………………………………………..11
(a) Le microcontrôleur…………………………………….11
(b) Alimentation…………………………………………11
(c) Visualisation…………………………………………12
(d) La connectique : ………………………………………..12
1.1.8. Caractéristique………………………………………………..13
1.1.9. Brochage de la carte Uno…………………………………………14
1.1.10. Les broches d'alimentations………………………………………14
1.1.11. Broches numériques……………………………………….……14
1.1.12. Broches analogiques…………………………………..…………15
1.1.13. Les avantages d’Arduino……………………………….…………15
5. Capteur distance : …………………………………………….17

3
1. Capteur de distance à Ultrasons HC-SR04…………………………………17
2. Le fonctionnement……………………………………………………..17
3. Les caractéristiques techniques du module…………………………………17
6. Moteur à Courant Continu………………………….…19
1.1.1. Le circuit de pilotage des moteurs : le L293 en double Pont H ………..………20
1.1.2. 1 Principe de fonctionnement du L293…………………………………21
1.1.3. Le pont en H……………………………………….……………22
1.1.4. Caractéristiques du pont en H…………………………………………23
Chapitre I I :
Table matière : …………………………………………..…………25
1.1.1. Evitement par régulation PID………………………………………..25
1.1.2. Introduction…………………………………………………….25
1) Les méthodes d’évitement d’obstacLe …………………………………
Evitement par régulation PID…………………………………
Les paramètres du PID…………………………………
Fonctionnement du PID…………………………………
Le fonctionnement du régulateur PID sur le robot…………………………………27
2) Résumé de fonctionnement du robot mobile ……………….28

4
Table de figure : …………………………………
Figure 1 : Voiture RC Electrique 1/10 ………………………………… 6
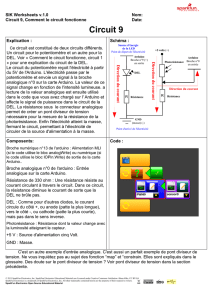
Figure 2 : Architecture de la carte arduino UNO ……………… 7
Figure 3 : l'interface de l'IDE arduino……………… 8
Figure 4 : le menu file d'arduino……………………………… 9
Figure 5 : les boutons de 'IDE arduino …………………………………10
Figure 6: présentation d'une carte arduino…………………………………11
Figure 7 : la connectique de la carte arduino…………………………………13
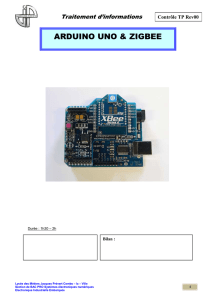
Figure 8: brochage d'un carte arduino…………………………………14
Figure 9 : Principe du capteur à ultrason…………………………………17
Figure 10 : le capteur de distance à Ultrason HC-SR04……………………….18
Figure 11 : Le brochage du module……19
Figure 12 : les deux parties essentielles de MCC…………………………….20
Figure 13 : Circuit intégré L293D ………………………………………..20
Figure 15 : Control de la rotation d’un moteur et son freinage par le L298……………22
Figure 16 : Schéma du principe de fonctionnement du pont en H …………………23
Figure 17: asservissement par régulateur PID ……………………………………26
Figure 18: Evitement d’obstacle par le robot …………………………………..27

5
1. Introduction générale :
Un des grands avantages de l'automatisation des procédures est la précision des résultats.
La robotique est utilisée dans plusieurs industries comme l'automobile, la médecine,
l'électroménager et plusieurs autres. Le plus complexe des machines peuvent être assemblées
à l'aide de la robotique.
Les robots peuvent être fixes (bras manipulateur) ou mobiles (robot marcheur, robot à
roues) selon l’application, les robots fixes sont généralement utilisés dans les usines, les
hôpitaux, domaine agricole, etc. Cependant, les robots mobiles sont généralement utilisés
dans les environnements dangereux nucléaires, militaires, déminage, etc. Ce dernier Type de
robot est notre domaine d’intérêt dans ce mémoire.
Le suivi d’objets en robotique mobile est devenu une des tâches les plus utilisées, notre
Projet consiste à réaliser un robot mobile (voiture autonome qui évite les obstacles) en
utilisant des capteurs et des actionneurs pour satisfaire ce projet.
2. Présentation du mémoire :
- Le premier chapitre sera consacré à la plateforme et les dispositifs utilisés
( software et hardware) pour satisfaire ce projet et leurs fonctions.
- Le deuxième chapitre explique les méthodes d’évitement d’obstacles et leurs
différences et les moyens de communications sans fils.
- Le troisième chapitre est une partie expérimentale pour réaliser et satisfaire la
conception de la plateforme, Communication avec PC, implémentation des
techniques et Comparaison des résultats.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%