Modélisation de la Machine Asynchrone à Double Alimentation (GADA)
Telechargé par
sacise220

Chapitre II Modélisation de la Machine Asynchrone à Double Alimentation (GADA)
24
II.1 Introduction
Il existe deux grandes familles d’éoliennes : celle à axe vertical et celle à axe horizontal.
Actuellement, les éoliennes à axe horizontal sont largement plus utilisées que les éoliennes à axe
vertical pour des raisons économiques liées à leur fabrication et à leur installation. Parmi les
éoliennes à axe horizontal, on distingue celles à vitesse fixe et celles à vitesse variable. Ces
dernières sont les plus couramment utilisées pour la production d’énergie électrique sur le
réseau électrique. En effet, les éoliennes à vitesse variable, contrairement aux éoliennes à vitesse
fixe, fonctionnent sur une large plage de vitesses permettant ainsi une maximisation des
puissances extraites pour de faibles vitesses du vent et le maintien d’une puissance constante
pour des vitesses de vent élevées.
Dans le cadre de nos travaux, nous avons donc choisi d’étudier une éolienne à vitesse
variable basée sur une génératrice électrique de type machine asynchrone à rotor bobiné, plus
communément appelé Machine Asynchrone à Double Alimentation (GADA).
Ce chapitre a pour objectifs de présenter la modélisation du système éolien à vitesse
variable basé sur une GADA.
II.2. Modélisation du système éolien
Les systèmes de génération d’énergie éolienne d’une puissance de 1 MW et plus utilisent
presque exclusivement les Machine Asynchrones à Double Alimentation (GADA). Celles-ci
présentent des avantages déterminant pour la production électrique dans le marché des turbines
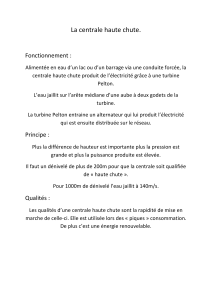
éoliennes de grande puissance. Le système de conversion éolienne à base de la GADA de la figure
(II-1) est constitué d’une turbine éolienne, une génératrice asynchrone à double alimentation, un
bus continu, deux convertisseurs statiques de puissance et un filtre triphasé de courant. La turbine
éolienne entraîne la GADA à une vitesse de rotation variable à travers un multiplicateur de vitesse.
Le stator de cette dernière est directement connecté au réseau électrique tandis que le rotor est
connecté au réseau via deux convertisseurs statiques bidirectionnels mis en cascade à travers un bus
continu. La présentation des modèles dynamiques des sous ensembles du système éolien ainsi
constitué, fera l’objet de ce premier chapitre. L’outil d’analyse adopté à cet effet, le schéma bloc
[Bou - 00], [Bou - 09], [Del-03], y sera également abordé.

Chapitre II Modélisation de la Machine Asynchrone à Double Alimentation (GADA)
25
Figure (II-1) : Système de conversion éolienne à base de la GADA.
II.3. Modélisation de la turbine
Le dispositif, que nous étudions ici, est constitué d’une turbine éolienne comprenant des
pales de longueur
R
entraînant une génératrice à travers un multiplicateur du gain G.
Figure (II-2) : Schéma de la turbine éolienne.
La puissance du vent ou puissance éolienne est définie de la manière suivante :
2.. 3
vS
Pv
(II-1)
Où :
: est la densité de l’air (approximativement
3
/22.1 mKg
à la pression atmosphérique
à
C
0
15
) ;
MADA
Turbine
Multiplicateur
Machine Asynchrone
A double alimentation
aer
T
turbine
eol
T
mec
Réseau 50 Hz
AC
DC
AC
DC

Chapitre II Modélisation de la Machine Asynchrone à Double Alimentation (GADA)
26
S
: est la surface circulaire balayée par la turbine, le rayon du cercle est déterminé par la
longueur de la pale.
v
: est la vitesse du vent.
La puissance aérodynamique apparaissant au niveau du rotor de la turbine s’écrit alors [Khe-07] :
2..
).,(. 3
vS
CPCP pvpaer
(II-2)
Le coefficient de puissance Cpreprésente le rendement aérodynamique de la turbine éolienne.
Il dépend de la caractéristique de la turbine
Le ratio de vitesse est défini comme le rapport entre la vitesse linéaire des pales et la vitesse du
vent :
vR
turbine.
(II-3)
Où
turbine
est la vitesse de la turbine.
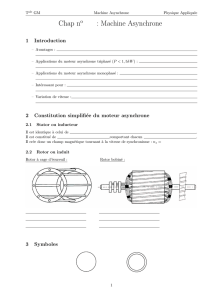
La courbe caractéristique de la voilure utilisée dans notre cas d’étude est présentée sur la
Figure (II-3).
0 2 4 6 8 10
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
X: 6.396
Y: 0.5483
Vitesse spécifique (lamda)
Coefficient de puissance (Cp)
Figure (II-3) : Courbe caractéristique retenue de Cp pour notre étude.
L’expression du coefficient de puissance
p
C
est spécifique à chaque éolienne et dépend
des caractéristiques intrinsèques de celle-ci. Si on suppose que l’angle de calage
(
=2) est fixe,
l’expression du
p
C
en fonction de
seulement peut être donné comme suit :

Chapitre II Modélisation de la Machine Asynchrone à Double Alimentation (GADA)
27
λopt = 6.396
Cpmax = 0.5483
Le couple aérodynamique est donc directement déterminé par [Mek-04] :
turbine
p
turbine
aer
aer vS
C
P
C
1
.
2..
.3
(II-5)
II.4. Modèle du multiplicateur
Le multiplicateur adapte la vitesse (lente) de la turbine à la vitesse de la génératrice
Figure (II-2). Ce multiplicateur est modélisé mathématiquement par les équations suivantes [Ela-
04]:
G
C
Caer
g
G
mec
turbine
(II-6)
(II-7)
II.5. Equation dynamique de l’arbre
La masse de la turbine éolienne est reportée sur l’arbre de la turbine sous la forme d’une
inertie
turbine
J
et comprend la masse des pales et la masse du rotor de la turbine. Le modèle
mécanique proposé considère l’inertie totale
J
constituée de l’inertie de la turbine reportée sur le
rotor de la génératrice et de l’inertie de la génératrice [Khe-07].
g
turbine J
G
J
J 2
(II-8)
L’équation fondamentale de la dynamique permet de déterminer l’évolution de la vitesse
mécanique à partir du couple mécanique total (
mec
C
) appliqué au rotor :
mec
mec C
dt
d
J
.
(II-9)
Où :
J
est l’inertie totale qui apparaît sur le rotor de la génératrice. Ce couple mécanique
prend en compte, le couple électromagnétique
em
C
produit par la génératrice, le couple des
frottements visqueux
vis
C
, et le couple du multiplicateur
g
C
.
visemgmec CCCC
(II-10)
Le couple résistant dû aux frottements est modélisé par un coefficient de frottements
visqueux f:

Chapitre II Modélisation de la Machine Asynchrone à Double Alimentation (GADA)
28
mecvis fC .
(II-11)
Le schéma bloc de la Figure (II-4) correspond aux modélisations aérodynamique et
mécanique de la turbine éolienne. Ce schéma bloc montre que la vitesse de rotation
m
de la
GADA, donc de la turbine, peut être contrôlée par action soit sur l’angle de calage des pales
,
soit sur le couple électromagnétique
em
C
de la GADA. La vitesse du vent v est considérée comme
une entrée perturbatrice au système.
Figure (II-4) : Modélisation de la partie mécanique de l’éolienne.
II.6. Modèle de la machine asynchrone à double alimentation (GADA)
II.6.1. Hypothèses simplificatrices
Pour l'étude de la génératrice asynchrone à double alimentation idéalisée, on introduit
les hypothèses simplificatrices suivantes :
L'entrefer est d'épaisseur uniforme et l'effet d'encochage est négligeable.
La saturation de circuit magnétique, l'hystérésis et les courant de Foucault sont
négligeables.
Les résistances des enroulements ne varient pas avec la température et on
néglige l'effet de peau.
On admet de plus que la f.m.m créée par chacune des armatures est à
répartition sinusoïdale.
sJf
1
mec
G
1
g
C
em
C
G
1
aer
C
aer
P
),( fCp
turbine
v
Rturbine
.
v
P
3
..
2
1vS
v
Turbine
Multiplicateur
L’arbre
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%