Un tel dispositif émet des ondes électromagnétiques et reçoit celles réfléchies par les
objets.
On donne : 1 mile nautique (mn) = 1,852 km.
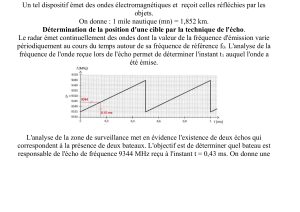
Détermination de la position d'une cible par la technique de l'écho.
Le radar émet continuellement des ondes dont la valeur de la fréquence d'émission varie
périodiquement au cours du temps autour de sa fréquence de référence f0. L'analyse de la
fréquence de l'onde reçue lors de l'écho permet de déterminer l'instant t1 auquel l'onde a
été émise.
L'analyse de la zone de surveillance met en évidence l'existence de deux échos qui
correspondent à la présence de deux bateaux. L'objectif est de déterminer quel bateau est
responsable de l'écho de fréquence 9344 MHz reçu à l'instant t = 0,43 ms. On donne une

copie de l'écran radar à cet instant.
On considère que les deux bateaux sont immobiles.
1.1. Donner la relation entre la distance d ( entre le radar et le bateau détecté) et t la
durée du trajet aller-retour de l'onde.
d = c t / 2 avec c = 3,0 108 m /s.
1.2. A quel instant a été émise l'onde de fréquence 9344 MHz ?

0,15 ms ( voir graphe ci-dessus ).
1.3. En déduire la distance d.
t = 0,43 -0,15 =0,28 ms = 2,8 10-4 s.
d = 3,0 108 x 2,8 10-4 / 2 = 4,2 104 m = 42 km.
1.4 Identifier le bateau correspondant à cet écho.
(1) se trouve à environ 23 mn soit 23 x1,852 ~43 km.
(2) se trouve à environ 29 mn soit 29 x1,852 ~66 km. On identifie (1).
1.5 Déterminer la valeur de la distance maximale que peut détecter ce radar et comparer
avec la valeur proposée par le constructeur soit 36 mn.
Période d'émission : 0,5 ms.
t doit être inférieure ou égale à 0,5 ms.
dmax = 3,0 108 x5 10-4 / 2 = 75 km soit 75 / 1,852 ~41 mn.
Ecart relatif (41-36) / 36 ~0,14 ( 14 %).
Limites du dispositif par effet Doppler.
Un navire de surveillance maritime équipé d'un radar et un bateau ( cible)
naviguent tous les deux dans la même direction.
En raison du mouvement relatif antre le radar et la cible, la fréquence de l'onde
reçue ne correspond pas à la fréquence de l'onde émise. Il existe un décalage de

fréquence f0 appelé décalage Doppler. Il dépende de la fréquence de l'onde
émise f0 = 9350 MHz, de la vitesse relative v entre les deux bateaux et de leur
position respective repérée par l'angle sur le schéma ci-dessous.
2.1. Pour quel angle le décalage est-il toujours nul ?
cos = 0 ; q = ±/2 + k avec k entier relatif.
Afin de ne pas introduire d'erreur dans le positionnement du bateau, ce décalage
Doppler ne doit pas être supérieur à la limite de détection du radar qui est de 1,5
kHz.
2.2 Pour = 0, déterminer la valeur de la vitesse relative maximale entre les deux
bateaux afin que cela n'introduise pas d'erreur dans son positionnement.
2 v /c f0 < 1,5 103 ; v < 1,5 103 c /(2f0).
v < 1,5 103 x 3,0 108 / (2 x9,35 109) = 24 m /s. ( ~87 km / h ).

Limites du dispositif par atténuation du signal.
Quand une onde électromagnétique se propage dans l'air, une partie de celle-ci esst
renvoyée dans toutes les directions, par exemple en raison de la présence de
molécules d'eau.
On donne : Pémise = 165 mW ; puissance minimale détectable 1 x 10-11 mW ; distance
maximale de détection : 36 mn ; f0 = 9350 MHz.
Evolution du coefficient d'atténuation en fonction de la quantité d'eau présente dans
l'air.
3.1. Quel type de propagation (libre ou guidée ) utilisent les systèmes radar ?
 6
6
1
/
6
100%