ESIM Département : Génie Mécanique
Conception de Machines
162
Chapitre 17
TRAINS EPICYCLOÏDAUX
I- INTRODUCTION :
Ce sont des systèmes composés de satellites montés sur un porte-satellite tournant autour de deux
planétaires. Ils présentent donc trois éléments mobiles par rapport à un autre fixe. Ils sont utilisés
tels quels dans les systèmes différentiels.
En bloquant un élément, on obtient, avec la même géométrie, différents rapports de réduction entre
les éléments encore mobiles. C'est d'ailleurs le principe utilisé dans les boîtes de vitesses
« automatiques ».
Ces trains sont très utilisés en mécanique car ils peuvent fournir des rapports de réduction énormes,
avec des pièces de taille raisonnable, et des rendements acceptables. De plus leur géométrie aboutit
souvent à une configuration où l'arbre d'entrée est coaxial avec l'arbre de sortie.
II- DIFFÉRENTS TYPE DES TRAINS EPICYCLOÏDAUX.
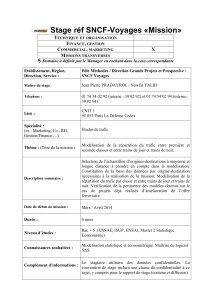
1- Train épicycloïdal simple :
Cas usuels de fonctionnement :
La
Fig1 : Train épicycloïdal avec deux satellites
Fig2 : Train épicycloïdal avec trois satellites
Cette configuration et la plus utilisée, le
rendement est bon et l’encombrement axial
faible, on peut avoir 2, 3 ou 4 satellites. Le
fonctionnement n’est possible que si l’un
des trois éléments principaux, planitaire 1,
planitaire3 (Couronne3) ou porte-satellite
PS, est bloqué ou entraîné par un autre
dispositif.
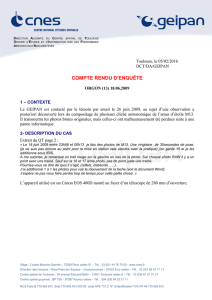
Fig3 : Schéma cinématique du train épicycloïdal simple

ESIM Département : Génie Mécanique
Conception de Machines
163
configuration avec planitaire 3 bloqué, est la plus utilisée : planitaire 1 en entrée et porte-
satellite PS en sortie.
Si le porte-satellite PS est bloqué, l’ensemble fonctionne comme un train classique à engrenage
intérieur avec roue (satellite) d’inversion.
Configuration avec trains en série :
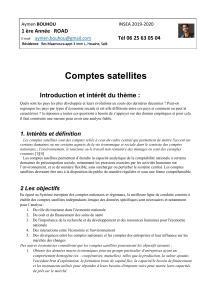
2- Trains épicycloïdaux avec satellites à deux roues.
Cette variante permet de plus grands rapports de réduction. Le satellite est réalisé à partir de
deux roues dentées 2 et 2’ dont les nombres de dents Z2 et Z2’ sont différentes.
Comme précédemment, le fonctionnement n’est possible que si l’un des trois éléments de base
(1,3 ou PS) est bloqué ou entraîné par un autre dispositif.
Fig. 5 : Combinaisons de trains épicycloïdaux simples.
Fig6 : Trains épicycloïdaux avec satellites à deux roues.

ESIM Département : Génie Mécanique
Conception de Machines
164
Cas usuels de fonctionnement :
Les configurations avec la couronne 3 ou le planitaire1 bloqués sont les plus utilisées (Porte-
satellite PS en sortie).
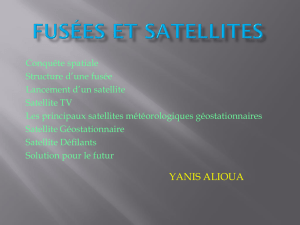
3- Trains épicycloïdaux sphériques simples
Ces trains sont semblables avec les trains épicycloïdaux plans simples mais ils comportent des
roues coniques, fig (8 et 9).
Fig. 7: Différents cas de fonctionnement avec satellites à deux roues.
Fig. 8 : Train sphérique à satellite simple
Fig. 9 : Train sphérique à satellite double

ESIM Département : Génie Mécanique
Conception de Machines
165
Cas usuel de fonctionnement :
Différentiel d’automobile : le différentiel correspond au train simple plan, mais il est
composé de planétaires et satellites coniques (Fig. 10). Les planétaires 1 et 3 sont identiques,
avec Z1 = Z3
La vitesse angulaire
de l’arbre moteur est réduite par un couple conique à denture spirale et
transmis au porte- satellite.
III- MONTAGES DES SATELLITES :
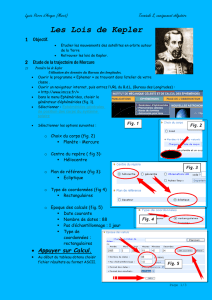
1- Montage du premier satellite :
Pour que le montage du premier satellite soit possible, il faut respecter la condition d’entraxe :
2- Montages des autres satellites.
On prend le cas d’un train épicycloïdal simple à trois satellites (Fig. 3)
Sur le parcours représenté, on doit avoir un nombre entier des pas de dents.
Le traçage de l’haricot (Fig. 11), nous permet d’écrire :
Dans le cas général de n satellites équidistants, on trouvera
la condition de montage suivante :
2321
23
32
21
213221 22 ZZZZ
ZZ
m
ZZ
maa
Car
3221 mm
k
Z
Z
ZZ 2323 2
3
21
avec k
*
IN
kZ
ZZ
2
31 3
ou encore
31 ZZ
: multiple de 3
k : nombre entier
Fig. 11 : Haricot d’un train
Z1
Z3
Z2
31 ZZ
: multiple de n
Fig. 10 : Différentiel d’automobile

ESIM Département : Génie Mécanique
Conception de Machines
166
IV- CALCUL DU RAPPORT DE TRANSMISSION :
Pour déterminer le rapport de transmission, on applique généralement la formule de Willis
Formule de Willis :
menéesZ
menantesZ
n
SPEplanétaire
SPSplanétaire 1
..
..
-
Splanétaire.
: Vitesse angulaire du planétaire (sortie) par rapport au bâti (0).
-
Eplanétaire.
: Vitesse angulaire du planétaire (Entré) par rapport au bâti (0).
-
SP.
: Vitesse angulaire du porte satellites par rapport au bâti (0).
- n : Nombre de contacts extérieurs.
-
: Raison basique (raison de base).
Cas1 : Train épicycloïdal simple : Couronne (Planitaire 3 bloqué)
30 = 0.
Equation de fonctionnement du train :-
Entrée : planétaire (1),
10 ≠ 0 on a
ps
ps
10
30
avec
30 = 0
ps
ps
10
01
10 ps
Raison basique :
3
1
32
21
1
1Z
Z
ZZ ZZ
Rapport de réduction :
On a :
1
10
rr ps
or
3
1
Z
Z
1
3
1
3
1
Z
ZZ
Z
r
31
1ZZ Z
r
Cas2 : Train épicycloïdal simple : Planitaire (1) bloqué
10 = 0.
Equation de fonctionnement du train :
Entrée : couronne (3),
30 ≠ 0 on a
ps
ps
30
10
avec
10 = 0
ps
ps
30
01
30 ps
Raison basique :
1
3
12
23
1
1Z
Z
ZZ ZZ
Rapport de réduction :
On a :
1
30
rr ps
or
1
3
Z
Z
1
1
3
1
3
Z
ZZ
Z
r
13
3ZZ Z
r
01
10 ps
: Equation de fonctionnement du train
01
30 ps
: Equation de fonctionnement du train
 6
7
8
9
6
7
8
9
1
/
9
100%