Devoir de Synthèse: Cellule Flexible - Sciences Techniques
Telechargé par
kraiem jasser

DOSSIER TECHNIQUE
CELLULE FLEXIBLE
Page 1/5
Système : CELLULE FLEXIBLE
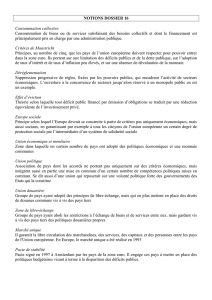
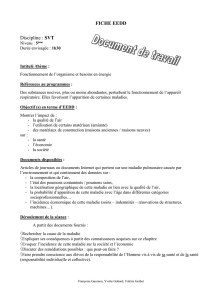
DESCRIPTION DU SYSTEME :
Ce système transporte sur un tapis roulant des pièces en cours d’usinage , celles-ci
sont identifiées à l’aide d’un lecteur de code à barres qui permet de préciser le type
d’usinage que doit subir la pièce type A et la pièce type B.
La pièce est alors saisie par un robot , qui la positionne sur une machine outil.
Le fonctionnement est ordonnée par un micro-ordinateur.
Après usinage , la pièce est encore saisie par le robot qui la dépose sur la rampe de
plan incliné , et par suite son transfert devant le vérin (B) ou (A) pour être éjecter
dans la goulotte de réception.
R
R
RE
E
EP
P
PU
U
UB
B
BL
L
LI
I
IQ
Q
QU
U
UE
E
E
T
T
TU
U
UN
N
NI
I
IS
S
SI
I
IE
E
EN
N
NN
N
NE
E
E
M
M
MI
I
IN
N
NI
I
IS
S
ST
T
TE
E
ER
R
RE
E
E
D
D
DE
E
E
L
L
L’
’
’E
E
ED
D
DU
U
UC
C
CA
A
AT
T
TI
I
IO
O
ON
N
N
S
S
SE
E
EC
C
CT
T
TI
I
IO
O
ON
N
N
:
:
:
S
S
SC
C
CI
I
IE
E
EN
N
NC
C
CE
E
ES
S
S
T
T
TE
E
EC
C
CH
H
HN
N
NI
I
IQ
Q
QU
U
UE
E
E
LYCEE TAHER E
L HADDED el hamma
LYCEE
Mohamed ali EL HAMMA
Devoir de SYNTESE N°01
Date: 05 – 12 – 2010
E
E
EP
P
PR
R
RE
E
EU
U
UV
V
VE
E
E
:
:
:
D
D
DI
I
IS
S
SC
C
CI
I
IP
P
PL
L
LI
I
IN
N
NE
E
E
S
S
SC
C
C.
.
.T
T
TE
E
EC
C
CH
H
HN
N
NI
I
IQ
Q
QU
U
UE
E
E
Niveau: 3ème Année.
DUREE : 4 heures
Observation : Aucune documentAtion n’est Autorisée. L’utiLisAtion de LA
calculatrice est permise.
Remarque :
Le robot sera le
support d’etude de la
partie mecanique.
<3

DOSSIER TECHNIQUE
CELLULE FLEXIBLE
Page 2/5
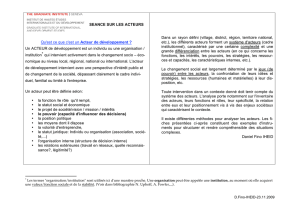
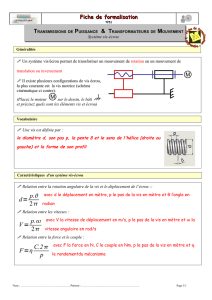
Schéma synoptique de la partie de commande :
Comptage des pièces à base des circuits 74LS74 :
Multiplexeur
Décodeur binaire
BCD/7segments
74LS48
Mémorisation
Digit 1 Mémorisation
Digit 2
Comparateur
Oscillateur
Sélection
Digits Codeur
Décimal binaire
Compteur C
Afficheur 7 segments
T
<c
LU
Ml
-
U
-
i
i
—
b_
C
4
S
6
D
7
8
9
E
A
0
B
F
D
>CLK
:CLK
ULK
Lr
-
Montage
1

DOSSIER TECHNIQUE
CELLULE FLEXIBLE
Page 3/5
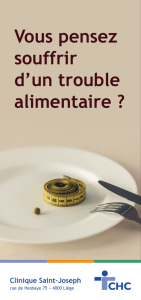
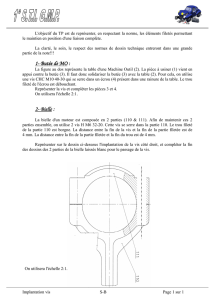
Document constructeur des circuits intégrés :
Circuit SN74LS74 :
Circuit 74LS109 :
Circ
D
2Q5
CLK
3
Q6
S4
R
1
U1:A
74LS74
SN74LS 74
14 13 12 11 10 09 08
01 02 03 04 05 06 07
1CLR 1D 1CLK
1PR 1Q 1Q
GND
Vcc 2CLR 2D 2CLK 2PR 2Q
2Q
1CLR 1J 1K 1CLK 1PRE
1Q
1Q GND
Vcc 2CLR 2J 2K 2CLK 2PRE
2Q 2Q
SN74LS 109
16 15 14 13 12 11 10
01 02 03 04 05 06 07 08
09
J
2Q6
CLK
4
K
3Q7
S5
R
1
6
6
0 1 2 3 4 5 6
GND
Sorties décimal
Entrées binaires Sorties décimal
VCC A B C D 9 8
7
13
14 15 16
7 8
5 4
3 2 1
10 9 11
74LS42
12
6
ÿfît

DOSSIER TECHNIQUE
CELLULE FLEXIBLE
Page 4/5
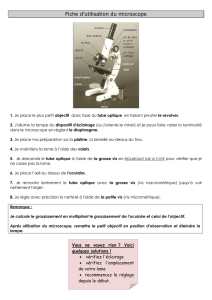
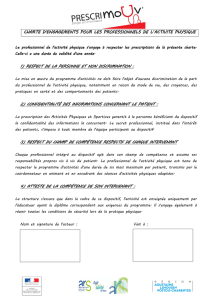
Nomenclatures :
Pièces standards :
Tableaux des écarts :
15 2 Axe
14 1 Entretoise 29 1 fourreau
13 1 Arbre de sortie 28 3 Vis CHc
12 2 Roulement BE 27 1 Couvercle
11 1 Arbre réducteur 26 1 Rondelle frein
10 1 Courroie
crantée 25 1 Ecrou à encoche
9 1 Vis Hc 20 MnCr5 24 1 Capot
8 1 Poulie 12 dents 23 1 Tube
7 1 Anneau
élastique 22 3 Plaquette
6 1 Coussinet 21 3 Vis CHc
5 1 Coussinet Cu Sn9P 20 1 Détecteur de fin de course
4 1 Vis Hc 19 2 Vis Hc
3 1 Arbre d’entrée 38 Cr 4 18 3 Vis CHc
2 3 Vis CHc 17 1 Poulie 40 dents GJS – 600-5
1 1 Excentrique X30Cr13 16 3 Vis CHc
Repère Nbre Désignation Matiere Repère Nbre Désignation
(1
a
Si
M
1.6
3
1.5
M
2
3.8
1.5
M2.5
4.5
2
M
3
5.5
2.5
M4
7
3
M
5
8.5
4
I
2.5
3
4
5
6
8
2.5
3
4
5
6
8
TETE
CYLINDRIQUE
à
six
pans
creux
1ËË
(X)
Symbole
C
HC
I
-
x
k
=
d
d
e
D
1.6
0.5
8
JÉL
2
0.5
7
2.5
0.5
10
3
0.8
12
4
0.8
14
5
1
16
T
RONDELLES
PLATES
ÿ
_
e
_
(
js
1
4
>
I
o
C
s
I
I
'
s
Jusqu'à
3
6
10
18
30
ARBRF.
3
à
6
à à à
à
inclus
inclus
10
18
30
50
c8
-14
-20
-25
-32
-40
-50
-28
-38
-47
-59
-73
-89
e9
-14
-20
-25
-32
-40
-50
-39
-50
-61
-75
-92
-112
k6
+6
+9
+
10
+
12
+
15
+18
0
+
1
+1
+
1
+2
+2
m5
+6
+9
+12
+
15
+
17
+20
+2
+4
+6
+7
+8 +9
m6
+8
+
12
+
15
+
18
+21
+25
+2
+4
+6
+7
+8
+9
n6
+
10
+
16
+
19
+23
+28
+33
+4
+8
+
10
+
12
+
15
+17
p6
+
12
+20
+24
+29
+35
+42
+6
+
12
+
15
+
18
+22
+26
Jusqu'à
3
6
10
18
30
50
ALESAGES
3
à
6
à
à à
à à
inclus
inclus
10
18
30
50
80
D10
+60
+78
+98
+
120
+
149
+
180
+220
+20
+30
+40
+50
+65
+80
+100
F7
+
16
+22
+28
+34
+41
+50
+60
+6
+
10
+
13
+
16
+20
+25
+30
G6
+8
+
12
+
14
+
17
+20
+25
+29
+2
+4
+5
+6
+7
+9
+
10
H6
+6
+8
+9
+
11
+
13
+
16
+
19
0
0
0
0 0
0 0
117
+
10
+
12
+
15
+
18
+21
+25
+30
0 0 0
0 0
0 0
118
+
14
+
18
+22
+27
+33
+39
+46
0
0
0
0 0
0 0
H9
+25
+30
+36
+43
+52
+62
+74
0 0
0
0 0
0
0

DOSSIER TECHNIQUE
CELLULE FLEXIBLE
Page 5/5
génératrice
tachymétrique
Moteur M1
Réducteur
1
/
5
100%