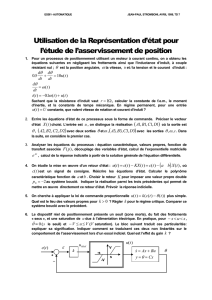
SUPPORT DE TRAVAUX PRATIQUES ASSERVISSEMENT ET CONTROLE MODERNE 22
a) Équations électriques
La tension d'induit (en convention récepteur) et la f.é.m induite sont données par:
()
( ) ( ) (1)
( ) (
2)
=++
=W
dit
u Rit L et
dt
eKt
Avec:
R: résistance d'induit,
L: inductance d'induit en henry,
et K: constante tenant compte du flux constant.
b) Équations mécaniques
Le principe fondamental de la dynamique du solide en rotation nous permet d'écrire:
()
(3)
W
=-
ur
dt
J TT
dt
J: moment d'inertie de l'axe du rotor en Kg.m2,
Tu : couple utile et Tr : couple résistant ou couple de charge.
On a aussi :
- (4)
= -=
uempp
T T T KIT
TP 6 : commande d’un moteur à courant continu en simulation
numérique
On désire réguler la vitesse d’un moteur à courant continu à excitation indépendante. On cherche à
établir un modèle dynamique de la machine à courant continu à excitation indépendante. On admet que
le flux de la machine est constant pendant le fonctionnement considéré.
Le logiciel de simulation est MATLAB/SIMULINK
Équations Électromécaniques du moteur à courant continu en régime dynamique
On modélise l'induit avec le modèle équivalent ci-dessous, en tenant compte de l'inductance L d'induit.

SUPPORT DE TRAVAUX PRATIQUES ASSERVISSEMENT ET CONTROLE MODERNE 23
Tem: couple électromagnétique et Tp: couple de pertes mécaniques.
(t) (5)
p
Tf=W
f: coefficient de frottement visqueux.
L’exploitation judicieuse des équations (1) à (4) permet d’écrire la dynamique du moteur comme suit :
()1
( ) ( ) ( ) (6)
()
( ) ( ) (7)
r
ditRK
it t ut
dtLLL
TdtKf
itt
dtJJJ
=- -W+
W= -W-
A : Préparation
En admettant que le courant i(t) de l’équation (6) peut être considéré comme une commande auxiliaire
ou intermédiaire,
1- Proposer une fonction de Lyapunov V1 et exploiter le fait que sa dérivée par rapport au temps
doit être négative pour trouver une expression i*(t) de la commande i(t) afin de garantir une
régulation de la vitesse de rotation du moteur. L’expression de i*(t) trouvée sera exploitée
comme un signal de référence de courant dont la régulation du courant à cette valeur permet de
réguler la vitesse à la valeur désirée.
2- Proposer une fonction de Lyapunov V2 et exploiter le fait que sa dérivée doit être négative pour
en déduire l’expression de la commande u(t).
3- Proposer également un schéma exploitant les régulateurs PI pour réguler le courant et la
vitesse. (Faire la synthèse de chaque PI en exploitant les dynamiques 6 et 7 et le schéma
suivant)
NB : Utiliser les valeurs des paramètres de la page 25

SUPPORT DE TRAVAUX PRATIQUES ASSERVISSEMENT ET CONTROLE MODERNE 24
B- Manipulation
B1- Le modèle du moteur à courant continu sera réalisé en utilisant des éléments de la
bibliothèque Simscape/power system
·En sélectionnant tout le schéma, vous créer un subsystem du moteur en effectuant un clic droit.
·Ensuite vous faite un clic droit sur le subsystem du moteur / Mask / create Mask ; ensuite cliquer
sur paramètre, ensuite Edit et entrer les paramètres du modèle.
·En double cliquant sur le moteur vous pourriez entrer les valeurs des paramètres du moteur.

SUPPORT DE TRAVAUX PRATIQUES ASSERVISSEMENT ET CONTROLE MODERNE 25
B2- Conception d’un modèle du Hacheur
Le hacheur utilisé est celui à quatre quadrants réversibles en courant et en tension permet le
fonctionnement dans les quatre quadrants du plan couple /vitesse avec récupération d’énergie dans les
phases décélération.
Il permet aussi de contrôler la tension de sortie par la modification du rapport cyclique suivant
l’équation suivante :
0
(2 1) U (8)
m
U
a
=-
Le modèle du hacheur en pont est donné par l’équation suivante :
120
(S )U (9)
m
US=-
Tel que S1 c’est l’état logique des interruptions T1 et T4 et S2 c’est l’état logique des interruptions T2
Pour ce modèle exacte, on utilise des interrupteurs idéaux dont le modèle se trouve dans
Simscape/power system. On utilisera par exemple les IGBT, mais le temps de simulation sera long.

SUPPORT DE TRAVAUX PRATIQUES ASSERVISSEMENT ET CONTROLE MODERNE 26
L’entrée Puls représente l’entrée des signaux de commande
On réalise la commande en exploitant la figure suivante ou on compare le signal de commande avec
un signal périodique triangulaire, afin de générer les signaux MLI complémentaires.
T est la période de Hachage. On prendra par exemple fH = 2Khz.
 6
7
6
7
1
/
7
100%