CAPTEURS INDUSTRIELS
CAPTEURS INDUSTRIELS
ET
ET
INSTRUMENTATION
INSTRUMENTATION
FACULTE DES SCIENCES ET TECHNIQUES TANGER

12/01/13 FSTT TANGER 2
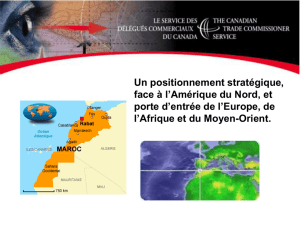
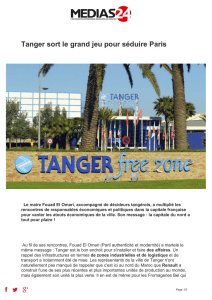
Solution a
une
température
de 25 C
Solution a
une
température
de 60 C
∆x∆θ
Introduction: La Mesure de la température
CAPTEURS INDUSTRIELS ET INSTRUMENTATION
CAPTEURS INDUSTRIELS ET INSTRUMENTATION

12/01/13 FSTT TANGER 3
Capteurs et Instruments de mesures
Capteurs et Instruments de mesures
Le principe de la mesure consiste
1- Porter le mercure a la même température que la solution.
2- Le mercure se dilate selon une loi ∆V=f(θ) et se propage dans le canal.
3- La lecture des graduations sur le canal renseigne sur la portée de la
dilatation qui elle, renseigne sur la température du mercure qui est la
même que celle de la solution.
Introduction: La Mesure de la température

12/01/13 FSTT TANGER 4
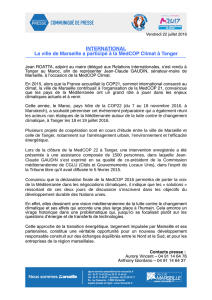
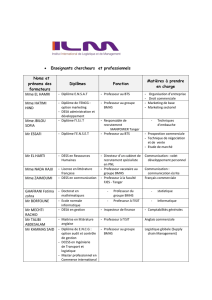
Capteur Conditionneur
Mesurande Mesure
CAPTEURS INDUSTRIELS ET INSTRUMENTATION
CAPTEURS INDUSTRIELS ET INSTRUMENTATION
Chaîne de mesure
Corps d’épreuve Transducteur Conditionneur
Mesurande
Mesure
Mesurage
Mesurande Mesure
Les capteurs industriels: Définitions et caractéristiques

12/01/13 FSTT TANGER 5
CAPTEURS INDUSTRIELS ET INSTRUMENTATION
CAPTEURS INDUSTRIELS ET INSTRUMENTATION
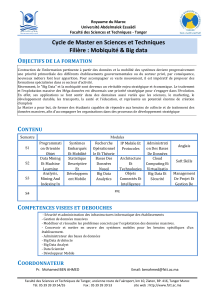
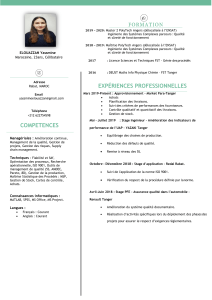
Corps d’épreuve Transducteur Transmetteur
Mesurande
Mesure
Mesurage
- Corps d'épreuve : Réagit sélectivement à la Mesurande et la
converti en une autre grandeur physique mesurable .
-Transducteur : Converti les réactions du corps d'épreuve en une
grandeur électrique appelée «le signal de sortie » .
- Transmetteur : Standardise la sortie s du capteur et permet si
nécessaire l’alimentation électrique du capteur.
m s
Capteur
Les capteurs industriels: Définitions et caractéristiques
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
1
/
77
100%