Machines électriques et commande Page 1 Claude Lahache
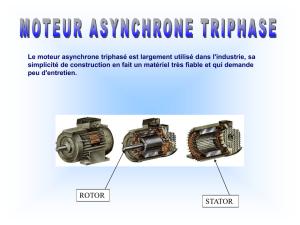
Moteurs Électriques et leur commande : Quelques Notions
1. Constitution.
Stator (partie fixe), rotor (partie tournante) et entrefer
constituent un circuit magnétique.
Ce circuit peut être magnétisé à l'aide d'aimants
permanents et (ou) d'enroulements parcourus par
des courants de forme adaptée au type de machine.
2. Conversion d’énergie - Réversibilité.
En théorie, toute machine électrique peut fonctionner en moteur (récepteur d'énergie électrique) ou en générateur.
En moteur, l'énergie électrique consommée se retrouve en énergie mécanique, sous la forme d'un couple moteur
disponible sur l'arbre de rotation (et inévitablement en chaleur !).
En générateur, l'arbre est entrainé en rotation par une énergie mécanique extérieure; en conséquence, la machine
est le siège de courants induits qui développent un couple résistant, s'opposant au couple mécanique qui
provoque la
rotation.
3. Quadrants de fonctionnement.
Le plan {couple -vitesse} est divisé classiquement en 4 quadrants.
Lorsque la machine tourne à la vitesse angulaire Ω, le couple mécanique sur l'arbre, de moment C (Nm),
correspond à une puissance P = C.Ω
Ω
Stator
Entrefer
Rotor
W
ELE
W
MEC
W
MECA
W
ELEC
Fonctionnement en moteur
Fonctionnement en générateur
Le fonctionnement dans les 4 quadrants est de type réversible
;
c’est la technique la plus performante, mais la plus complexe
Elle se rencontre en traction et en robotique
Vitesse Ω (rad/s)
Couple (Nm
)
0
Quadrant 1
C×Ω > 0
Moteur
Quadrant 3
C×Ω > 0
Moteur
Quadrant 2
C×Ω < 0
Générateur
(ou frein)
Quadrant 4
C×Ω < 0
Générateur
(ou frein)

Machines électriques et commande Page 2 Claude Lahache
Fonctionnement dans un seul quadrant (non réversible)
Dans ce mode, la machine est soit un moteur, soit un générateur, et le sens de rotation ne change pas.
Fonctionnement non réversible dans 2 quadrants
Ce mode concerne essentiellement les moteurs pouvant tourner dans les deux sens .
Fonctionnement réversible dans 2 quadrants
Dans ce mode, la machine peut passer de moteur à générateur et inversement.
Selon le contexte, le sens de rotation change ou pas.
Vitesse
Couple
Quadrant 1
C×Ω > 0
Moteur
0
Ex
: Perceuse électrique, aspirateur,
pompage , ventilation
Quadrant 4
C×Ω < 0
Générateur
(ou frein)
Vitesse
Couple
0
Ex
: Éolienne, alternateurs
(de vélo, voiture, avion)
Vitesse
Couple
0
Quadrant 1
C×Ω > 0
Moteur
Quadrant 3
C×Ω > 0
Moteur
Ex
: Visseuse dévisseuse, lève
vitre, volets roulants…
Vitesse
Couple
0
Quadrant 1
C×Ω > 0
Moteur
Quadrant 2
C×Ω < 0
Générateur
(ou frein)
Ex
: Treuil, levage
pompage
-
turbinage de l’eau
Vitesse
Couple
0
Quadrant 1
C×Ω > 0
Moteur
Quadrant 4
C×Ω < 0
Générateur
(ou frein)
Ex
: Scooter électrique,
laminoir, dérouleuse

Machines électriques et commande Page 3 Claude Lahache
4. Origine du couple moteur.
La magnétisation de la machine crée 2 champs : B
ROT
(produit par le rotor) et B
STAT
(produit par le stator).
Ces 2 champs sont d'orientation radiale; ils sont fixes dans l'espace (cas des machines à courant continu), ou bien
tournant autour de l'axe (ex : machines à courants alternatifs).
L'interaction entre ces 2 champs est à l'origine d'un couple électromagnétique. Dans le cas d'un moteur, le moment
de ce couple est proportionnel au module des 2 champs et au sinus de l'angle θ qu'ils font entre eux :
θ
Le couple moteur peut évoluer entre une valeur nulle (si les 2 champs sont alignés)et une valeur maximale (si les 2
champs sont perpendiculaires)
5. Architecture d’un variateur pour machine électrique.
La machine à contrôler est couplée à une charge mécanique. L'ensemble tourne à une vitesse angulaire Ω (rad/s).
L'énergie électrique est échangée avec la machine à travers un convertisseur statique . Ce convertisseur est un
circuit de puissance constitué essentiellement d'interrupteurs électroniques (mono ou bidirectionnels : diodes,
transistors, thyristors...), commandés à la fermeture ou (et) à l'ouverture grâce à un circuit de régulation.
La régulation ajuste au mieux la commande du convertisseur, en fonction de consignes définies par l'utilisateur,
mais également en fonction d'informations issues de capteurs divers placés sur la machine et (ou) la charge
mécanique. (tension, courant, vitesse de rotation, couple, position angulaire...)
L'ensemble forme un système bouclé, avec la problématique qui s'y rapporte : Stabilité, rapidité et précision.
Convertisseur
statique
(électronique
)
Machine
électrique
Charge
mécanique
(entraînée/
entraînante)
Ω
Énergie
Alimentation
électrique
Capteurs Capteurs
Régulation
Consignes
B
STAT
B
ROT
θ
Moment du couple moteur
:
C
MOT
= k×B
STAT
×B
ROT
×sinθ
C
MOT
est maximal si θ = 90
°
Équivalent mécanique
θ
ressort
charge
Ω
F
F

Machines électriques et commande Page 4 Claude Lahache
6. Machine à courant continu.
6.1. Constitution et fonctionnement
La machine à courant continu est une des plus anciennes (1
ère
moitié du XIX
ème
siècle)
Son stator porte des aimants permanents ou des enroulements parcourus par un courant continu. Le champ
statorique B
STAT
résultant est radial, de direction fixe.
Le rotor porte à sa périphérie un enroulement complexe, dont les conducteurs sont logés dans des encoches; seuls
certains de ces conducteurs sont alimentés, créant un champ rotorique B
ROT
, également radial, mais de direction
constante et perpendiculaire au champ statorique B
STAT
.
Avec une telle disposition, le couple moteur est optimisé (C
MOT
= k.B
ROT
.B
STAT
.sin90°).
Les conducteurs rotoriques sont alimentés grâce à des charbons (ou balais) qui frottent sur un collecteur, formé de
lames de cuivre séparées.
Ce contact frottant est le point faible de la machine (encrassement, usure, source d'étincelles)
L'ensemble collecteur - charbons permet de sélectionner les brins rotoriques alimentés et d'inverser le sens du
courant dans ces brins 2 fois par tour : Les conducteurs passant sous un pôle sont toujours traversés par un courant
de même sens.
B
STAT
B
ROT
Collecteur
Charbons Encoches
Conducteurs
Détails du rotor d'une machine
à courant continu
I = 0
I
I
Illustration de l'inversion du courant dans une spire 2 fois par tour

Machines électriques et commande Page 5 Claude Lahache
6.2. Modélisation électrique.
La magnétisation du stator est supposée fixe; elle n'est pas représentée.
Le modèle du rotor (induit) est celui d'un récepteur inductif :
La f.é.m E traduit la conversion d'énergie : Si la vitesse angulaire de rotation
est Ω, la f.é.m s'exprime par
La constante K (Vs/rad) dépend de la structure de la machine et de la magnétisation
due au stator.
La loi des mailles aux bornes du rotor s'écrit :
(en régime permanent, avec I = C
TE
)
(Si le courant d'induit I varie (démarrage, phases transitoires ...), il faut en plus faire intervenir la tension induite
aux bornes de l'inductance L, soit
Le moment du couple moteur s'obtient par un bilan de puissances : P
ABSORBEE
= U.I = E.I + R.I
2
R.I
2
→ pertes par effet Joule
E.I → puissance transformée sous forme mécanique, soit puissance développée par le moment du couple moteur :
E.I = C
MOT
.Ω , et comme E = K.Ω, il vient
La commande en vitesse d'une telle machine se fait par la tension U.
Le convertisseur dédié à ce type de machine se nomme hacheur. Une source continue (Vcc) est découpée par un
réseau d'interrupteurs, fonctionnant à fréquence fixée, mais à rapport cyclique ouverture/fermeture réglable.
(Voir un exemple classique sur la page suivante)
6.3. Remarque : Moteur série ou encore moteur universel.
Dans ce type de moteur, les bobinages du rotor et du stator sont reliés en série, le courant I qui les traverse est donc
le même.
Il fonctionne aussi bien alimenté en continu qu'en alternatif (d'où son nom) : En alternatif, l'inversion du sens du
courant simultanément dans les 2 enroulements ne change rien à son fonctionnement.
Pour ce type de moteur, les lois deviennent :
avec R
STAT
: résistance du stator et R
ROT
: résistance du rotor
avec K' fonction de la structure de la machine et I fixant la magnétisation
!
d'autant plus élevé que le moteur est chargé, C
MOT
est maximal au démarrage.
De part son fort couple moteur, ce type de moteur est très utilisé dans les démarreurs de moteurs thermiques
(alimentation en continu par la batterie), les appareils électroménagers ou l’outillage électroportatif (alimentation
par le réseau alternatif 50 Hz).
L
R
E
U
I
Rotor : Schéma électrique
M
I
U
Rotor :
Symbole équivalent
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%