ROBOTIQUE INDUSTRIELLLE
Chapitre 1 : Transformations homogènes
Chapitre 1 : Transformations homogènes
Abdelhak NAFI - Octobre 2016

Chapitre 1
•Introduction à la matière (Suite):
–Définitions et terminologie
•Début de la matière sur les transformations homogènes:
•Début de la matière sur les transformations homogènes:
–Coordonnées homogènes : Qu’est-ce que c’est et pourquoi les
utiliser?
–Transformations 2D
–Transformations 3D

Culture générale en robotique (1)
•Qu’est-ce qu’un robot? :
–Plusieurs définitions existent [1]:
•
[Dictionnaire]: (1) Une machine capable d’exécuter une série de tâches
[Dictionnaire]: (1) Une machine capable d’exécuter une série de tâches
complexes automatiquement, spécifiquement celles programmées par
ordinateur. (2) Une machine qui ressemble et qui agit comme un
humain. (3) Un système qui effectue des tâches répétitives
automatiquement. (4) Quelque chose guidé par un contrôle
automatique.

•Qu’est-ce qu’un robot? (suite) :
•[Définition de l’industrie [1]]: (1) Un manipulateur multifonctionnel et
reprogrammable conçu pour déplacer du matériel, des pièces, des outils ou
tout autre équipement spécialisé, via des intructions programmées.
Culture générale en robotique (2)
4
[Définition philosophique]: Tout système autonome
ou semi-autonome.

Culture générale en robotique (3)
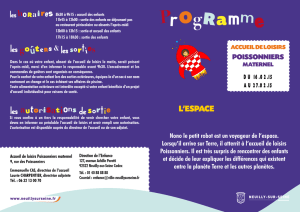
•Quelques types de robots:
- Robots statiques: Robots ayant
une base fixe (e.g. : les robots du
laboratoires, les robots typiques
d’une chaîne de production).
5
d’une chaîne de production).
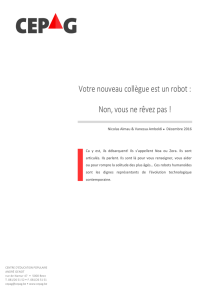
- Robots mobiles: Robots qui se
déplacent dans l’espace de
travail (par exemple, les robots
explorateurs de planètes)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
1
/
79
100%