Ce manuel de cours « Electronique de Puissance» est un outil qui permet aux
étudiants du réseau des Instituts Supérieurs des Etudes Technologiques de suivre les
cours cités avec un maximum de profit. Il s’adresse également aux étudiant de la
section B.T.S et ingénieurs préparant des concours d’agrégation ou technologique, Il
est recommandé aux étudiants préparant leurs mastère.
Par ailleurs, il est utile pour les enseignants qui désirent améliorer, progresser et
posséder un fondement en cette matière.
Ce manuel de cours est complémenté par un fascicule des travaux dirigés, plus un
CD ROM, propriétaire de l’auteur sur demande, comportant toutes les simulations
existantes dans ce manuel en utilisant le logiciel Matlab.

Sommaire
i
Liste de matières
1. GENERALITES_______________________________________________________________________ 2
2. APPLICATION ET CLASSIFICATION___________________________________________________ 2
3. RAPPELS SUR LES SEMI-CONDUCTEURS DE PUISSANCE _______________________________ 3
3.1. DIODES____________________________________________________________________________ 3
3.2. THYRISTORS________________________________________________________________________ 8
3.3. PRINCIPALES CARACTERISTIQUES ______________________________________________________ 11
3.4. TRANSISTORS BIPOLAIRES ____________________________________________________________ 11
3.5. THYRISTORS GTO __________________________________________________________________ 12
3.6. TRANSISTORS A EFFET DE CHAMP_______________________________________________________ 13
3.7. TRANSISTORS IGBT_________________________________________________________________ 15
4. RAPPELS SUR LES SIGNAUX PERIODIQUES NON SINUSOÏDAUX _______________________ 17
4.1. SIGNAL PERIODIQUE_________________________________________________________________ 17
4.2. VALEURS CARACTERISTIQUES _________________________________________________________ 17
4.3. DEVELOPPEMENT EN SERIE DE FOURIER ________________________________________________ 17
5. NOTIONS DES PUISSANCES ET FACTEUR DE PUISSANCE EN MONOPHASE_____________ 18
LES REDRESSEURS AC/DC NON COMMANDES: ____________________________________ 19
LES REDRESSEURS A DIODES______________________________________________________ 19
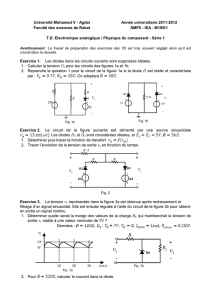
1. INTRODUCTION ____________________________________________________________________ 20
2. REDRESSEMENT SIMPLE ALTERNANCE EN MONOPHASE_____________________________ 20
2.1. DEBIT SUR UNE CHARGE RESISTIVE _____________________________________________________ 20
2.2. DEBIT SUR UNE CHARGE (R, E) ________________________________________________________ 21
2.3. DEBIT SUR UNE CHARGE INDUCTIVE (R, L) _______________________________________________ 23
2.4. DEBIT SUR UNE CHARGE INDUCTIVE MUNIE D’UNE DIODE DE ROUE LIBRE ________________________ 25
3. REDRESSEMENT DOUBLE ALTERNANCE EN MONOPHASE____________________________ 27
4. REDRESSEMENT TRIPHASE SIMPLE ALTERNANCE___________________________________ 29
4.1. RAPPEL SUR LE SYSTEME DE TENSIONS TRIPHASEES_________________________________________ 29
4.2. ETUDE CINETIQUE __________________________________________________________________ 30
4.3. MONTAGE (P3KC) A CATHODES COMMUNES _______________________________________________ 31
4.4. MONTAGE (P3AC) A ANODES COMMUNES _________________________________________________ 34
5. RDERSSEMENT DOUBLE ALTERNANCE EN TRIPHASE PD3____________________________ 36
6. MONTAGE REDRESSEUR A COMMUTATION SERIE (S3)_______________________________ 39
7. REDRESSEMENT POLYPHASES ______________________________________________________ 41
LES REDRESSEURS COMMANDES: AC/DC__________________________________________ 45
1. INTRODUCTION ____________________________________________________________________ 46
2. REDRESSEMENT SIMPLE ALTERNANCE _____________________________________________ 46
2.1. DEBIT SUR UNE CHARGE RESISTIVITE ____________________________________________________ 46
2.2. DEBIT SUR UNE CHARGE INDUCTIVE (R, L) _______________________________________________ 47
3. REDRESSEMENT DOUBLE ALTERNANCE EN MONOPHASE (P2T) _______________________ 49
3.1. DEBIT SUR UNE CHARGE RESISTIVITE ____________________________________________________ 49
3.2. DEBIT SUR UNE CHARGE INDUCTIVE (RL) ________________________________________________ 50
4. REDRESSEMENT DOUBLE ALTERNANCE EN MONOPHASE (PD2T)______________________ 52

Sommaire
ii
5. REDRESSEMENT SIMPLE ALTERNANCE EN TRIPHASE _______________________________ 53
5.1. MONTAGE REDRESSEUR A CATHODES COMMUNES P3TKC _____________________________________ 53
5.2. MONTAGE REDRESSEUR A ANODES COMMUNES P3TAC _______________________________________ 56
6. REDRESSEMENT DOUBLE ALTERNANCE EN TRIPHASE_______________________________ 57
6.1. MONTAGE REDRESSEUR PD3T__________________________________________________________ 57
7. LES PONTS REDRESSEURS MIXTES __________________________________________________ 60
7.1. MONTAGE PD2 MIXTE SYMETRIQUE _____________________________________________________ 60
7.2. MONTAGE PD2 MIXTE ASYMETRIQUE (DISSYMETRIQUE) _____________________________________ 61
7.3. MONTAGE PD3 MIXTE _______________________________________________________________ 62
CACLCUL DE LA CHUTE DE TENSION D’UN REDRESSEUR: AC/DC ________________ 66
1. ETUDE DE LA CHUTE DE TENSION DE LA SOURCE ET DU COMMUTATEUR ____________ 67
1.1. INDUCTANCES DE FUITES ET EMPIETEMENT _______________________________________________ 67
1.2. ETUDE DE L’INFLUENCE DES RESISTANCES________________________________________________ 70
1.3. CHUTE DE TENSION DUE AU COMMUTATEUR ______________________________________________ 71
1.4. EXEMPLES DE MONTAGES ____________________________________________________________ 71
2. MODELE DU CONVERTISSEUR ______________________________________________________ 73
3. RENDEMENT D’UN MONTAGE REDRESSEUR _________________________________________ 73
4. FONCTIONNEMENT EN COURT-CIRCUIT_____________________________________________ 73
5. COURANT DE COURT-CIRCUIT ______________________________________________________ 74
LES REDRESSEURS DC/DC: LES HACHEURS_______________________________________ 75
1. GENERALITES______________________________________________________________________ 76
1.1. DEFINITIONS_______________________________________________________________________ 76
1.2. UTILISATIONS______________________________________________________________________ 76
2. STRUCTURES FONDAMENTALES ____________________________________________________ 76
3. HACHEUR SERIE____________________________________________________________________ 77
3.1. MOTEUR A COURANT CONTINU COMMANDE PAR UN HACHEUR SERIE____________________________ 78
3.2. ETUDE DE LA CONDUCTION DISCONTINUE ________________________________________________ 79
3.3. CARACTERISTIQUES DE CHARGES_______________________________________________________ 81
4. HACHEUR PARALLELE _____________________________________________________________ 82
5. HACHEURS A ACCUMULATION D’ENERGIE __________________________________________ 84
5.1. HACHEURS A STOCKAGE INDUCTIF______________________________________________________ 84
5.2. HACHEURS A STOCKAGE CAPACITIF _____________________________________________________ 85
6. HACHEURS REVERSIBLE EN PUISSANCE_____________________________________________ 87
6.1. HACHEUR REVERSIBLE EN COURANT ____________________________________________________ 88
6.2. HACHEUR REVERSIBLE EN TENSION _____________________________________________________ 89
6.3. HACHEUR REVERSIBLE EN COURANT ET EN TENSION ________________________________________ 90
LES CONVERTISSEURS DC/AC: LES ONDULEURS __________________________________ 93
1. DEFINITIONS ET STRUCTURES ______________________________________________________ 94
2. ONDULEUR DE COURANT ET DE TENSION ___________________________________________ 95
2.1. DEFINITION _______________________________________________________________________ 95
2.2. COMMANDE DE L’ONDULEUR MONOPHASE DE TENSION EN DEMI PONT __________________________ 96
2.3. COMMANDE DE L’ONDULEUR MONOPHASE DE TENSION EN PONT_______________________________ 97

Sommaire
iii
3. ONDULEUR DE TENSION MONOPHASE EN COMMANDE SIMPLE OU DECALE __________ 98
3.1. COMMANDE SIMPLE (OU PLEINE ONDE) __________________________________________________ 98
3.2. COMMANDE DECALEE _______________________________________________________________ 99
4. ONDULEUR DE TENSION TRIPHASE_________________________________________________ 100
5. ONDULEUR MLI INTERSECTIVE (SINUS/TRIANGLE) _________________________________ 107
5.1. MODELISATION ET COMMANDE DE L’ONDULEUR MONOPHASE________________________________ 107
5.2. MODELISATION ET COMMANDE DE L’ONDULEUR TRIPHASE __________________________________ 110
LES CONVERTISSEURS AC/AC : LES GRADATEURS _______________________________ 113
1. GENERALITES_____________________________________________________________________ 114
1.1. DEFINITION ______________________________________________________________________ 114
1.2. PRINCIPE DE FONCTIONNEMENT _______________________________________________________ 114
1.3. CONSTITUTION____________________________________________________________________ 114
2. GRADATEUR MONOPHASE A ANGLE DE PHASE _____________________________________ 115
2.1. CHARGE RESISTIVE_________________________________________________________________ 115
2.2. CHARGE A CARACTERE INDUCTIF______________________________________________________ 117
3. GRADATEUR MONOPHASE A TRAIN D’ONDES_______________________________________ 119
3.1. DEFINITION ______________________________________________________________________ 119
3.2. PRINCIPE DE FONCTIONNEMENT _______________________________________________________ 119
3.3. DOMAINE D’UTILISATION DE CE GENRE DE GRADATEUR ____________________________________ 119
4. GRADATEUR TRIPHASE____________________________________________________________ 120
4.1. CONSTITUTION____________________________________________________________________ 120
4.2. GRADATEUR TRIPHASE EN AMONT _____________________________________________________ 120
4.3. GRADATEUR TRIPHASE EN AVAL ______________________________________________________ 121
4.4. GRADATEUR TRIPHASE CAS D’UNE CHARGE RESISTIVE _____________________________________ 122
4.5. GRADATEUR TRIPHASE CAS D’UNE CHARGE RL___________________________________________ 123
5. GRADATEUR TRIPHASE MIXTE_____________________________________________________ 124
6. DOMAINE D’UTILISATION DES GRADATEURS_______________________________________ 126
BIBLIOGRAPHIE___________________________________________________________________ 127
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
1
/
132
100%




![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)