Simplex Method Correction: Introduction to Optimization and Operations Research
Telechargé par
theo.vitupier

Introduction to optimization
and operations research (2019–2020)
Lecturer: Michel Bierlaire, Teaching assistants: Nourelhouda Dougui, Stefano Bortolomiol
Simplex – correction (18 October 2019)
Solution of question 1:
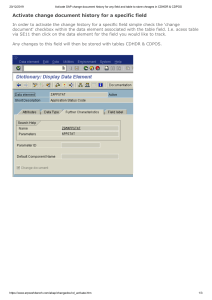
1. The feasible region is shown in gray in Figure 1.
x1
x2
-3 -2 -1 0 1 2 3 4 5
0
1
2
3
4
5
A
B
C
DE
F
Figure 1: Feasible domain
2. Constraints are active when they are verified as equality. Therefore,
we search for the solutions to this system of equations:
x1+x2= 5,
−x1+ 2x2= 3.
We solve the system of equations by substitution or by elimination and
we obtain
x2=8
3, x1=7
3.
If constraints (1) and (2) are active, it corresponds to the vertex (7
3,8
3),
that is point Cin Figure 1.
3. The basic solutions correspond to the intersections of all pairs of con-
straints: A= (0,0),B= (0,3
2),C= (7
3,8
3),D= (5,0),E= (−3,0),
F= (0,5).
1

Introduction to optimization
and operations research (2019–2020)
Lecturer: Michel Bierlaire, Teaching assistants: Nourelhouda Dougui, Stefano Bortolomiol
Simplex – correction (18 October 2019)
4. The feasible basic solutions are the following 4 vertices: A= (0,0),
B= (0,3
2),C= (7
3,8
3),D= (5,0). Indeed, they satisfy all constraints
(1-4). E= (−3,0) does not satisfy constraint (3), while F= (0,5)
does not satisfy constraint (2).
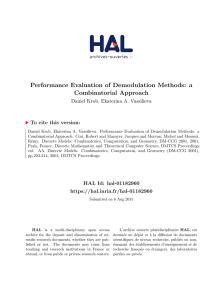
5. We have to add the level lines corresponding to different values of the
objective function. We start by drawing an arbitrary level line inter-
secting the feasible domain, say f=−2x1+ 2x2= 0. The gradient
corresponds to the steepest ascent direction. As we minimize, we need
to identify the steepest descent direction, that is
−∇f(x) = −c=2
−2.
We move this level line parallel to itself as far as possible in the direction
of −cas long as it intersects the feasible domain. The minimum value
that the objective function can take is f=−10. The optimal solution
corresponds to vertex D(5,0), as shown in Figure 2.
x1
x2
-3 -2 -1 0 1 2 3 4 5
0
1
2
3
4
5
A
B
C
DE
F
f= 0 f=−10
Figure 2: Graphical method
2

Introduction to optimization
and operations research (2019–2020)
Lecturer: Michel Bierlaire, Teaching assistants: Nourelhouda Dougui, Stefano Bortolomiol
Simplex – correction (18 October 2019)
Solution of question 2:
1. There are two basic variables. Recall that the columns corresponding
to the basic variables are composed of zeros, except one "one". In this
case, the basic variables are x1and x4. The position of the "one" in the
column of a basic variable identifies the corresponding row. Therefore,
the basic variable x1corresponds to row 1, and the basic variable x4
corresponds to row 2.
2. In order to identify the vertex xT= (x1, x2, x3, x4), we need to find
the values of x1,x2,x3and x4. We know that the non basic variables
are equal to zero: x2=x3= 0. Also, the value of each basic variable
is found in the rightmost column of the row that identifies the basic
variable: x1= 2 and x4= 4. Therefore, xT= (2,0,0,4).
3. The value in the lower-right part of the tableau is equal to the oppo-
site of the objective function value. Therefore, the objective function
value is −4. Alternatively, the value of the objective function can be
calculated as the scalar product cTx:
cTx=−2−1 0 0
2
0
0
4
=−4+0+0+0=−4.
4. The reduced costs can be found in the lower-left part of the tableau.
The reduced cost for x2is −3. It is negative, meaning that the objec-
tive function decreases along the corresponding basic direction. The
reduced cost for x3is 2. It is positive, meaning that the objective
function increases along the corresponding basic direction.
5. We consider the basic solution where x1and x4are in the basis:
xB=B−1b=2
4.
The basic entries of the basic directions are found in the top-left part
3

Introduction to optimization
and operations research (2019–2020)
Lecturer: Michel Bierlaire, Teaching assistants: Nourelhouda Dougui, Stefano Bortolomiol
Simplex – correction (18 October 2019)
of the tableau, with a different sign. Therefore,
(d2)B=1
−2, d2=
1
1
0
−2
,
and
(d3)B=−1
1, d3=
−1
0
1
1
.
Moving along d2, we obtain
x+=
2
0
0
4
+α
1
1
0
−2
=
2 + α
α
0
4−2α
,
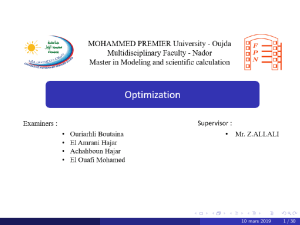
which is feasible for 0≤α≤2. Therefore, the basic direction d2is
feasible.
Moving along d3, we obtain
x+=
2
0
0
4
+α
−1
0
1
1
=
2−α
0
α
4 + α
,
which is feasible for 0≤α≤2. Therefore, the basic direction d3is
feasible.
The feasible region and the two directions are represented on the fol-
lowing graph.
4

Introduction to optimization
and operations research (2019–2020)
Lecturer: Michel Bierlaire, Teaching assistants: Nourelhouda Dougui, Stefano Bortolomiol
Simplex – correction (18 October 2019)
x1
x2
-3 -2 -1 0 1 2 3 4 5
0
1
2
3
4
5
d3
d2
A
B
C
D
E
F
Figure 3: Feasible region and directions
Solution of question 3:
1. Which of the following statements about a feasible basic solution is true
for a minimization problem?
(a) If ¯c < 0, that is, all reduced costs are negative, the solution is
optimal.
(b) If the values of the basic variables are negative, the solution is
optimal.
(c) If ¯cN>0, that is, the reduced costs of the non basic variables are
positive, the solution is optimal.
Answer: (c).
Answer (a) is false. Theorem 6.30 (necessary optimality conditions)
says that if the solution is optimal, then the reduced costs are non
negative. The contrapositive is that, if the reduced costs are negative,
the solution is not optimal. Answer (b) is false because if the values
of the basic variables are negative, then the solution is infeasible, since
5
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%